Ansteuerung über digitale Schnittstellen

Ansteuerung über digitale Schnittstellen
Schnelle USB- oder TCP/IP-Interfaces zählen neben RS-232 zu den Standardschnittstellen, die moderne Digitalcontroller von PI unterstützen.
Darüber hinaus bietet PI auch echtzeitfähige Schnittstellen wie eine SPI oder ein paralleles 32-Bit-Input/Output-Interface (PIO) an.
Kundenspezifische serielle Schnittstellen sind ebenfalls möglich, um die Anbindung an die Anwendungsumgebung herzustellen.
Analoge Schnittstellen: Kommandieren in Echtzeit
Im Falle analoger Treiber wird der analoge Eingangswert linear verstärkt und die Ausgangsspannung an den Antrieb weiter gegeben. Analoge Motion Controller, wie sie für piezobasierte Positioniersysteme noch verwendet werden, besitzen einen analogen PID-Regler und Linearisierungsverfahren, wodurch die Eingangsspannung möglichst linear der Soll-Position entspricht. Die Auflösung und Prozesszeit hängt dadurch unmittelbar von den verwendeten Komponenten ab und ermöglicht Sub-Nanometer-Bewegungen und eine Kommandierung in Echtzeit.
Auch viele digitale Motion Controller von PI besitzen analoge Schnittstellen, die für einen externen Sensor oder als Quelle zur Erzeugung des Stellwerts verwendet werden können. Um die Echtzeitfähigkeit und Auflösung eines analogen Controllers zu erreichen, setzt PI schnelle Prozessoren und hochauflösende 16 bis 20 Bit A/D-Wandler mit Oversamplingverfahren ein.
Analogausgänge können als Monitor der Achsenposition oder zur Ansteuerung eines externen Motortreibers verwendet werden.
Darüber hinaus bietet PI für viele Steuerungen eine analoge Schnittstelle als Anschluss für externe Bedienelemente wie Joysticks an. Moderne Controller von PI unterstützen für diesen Zweck HDI-Geräte, die über eine USB-Schnittstelle mit dem Controller verbunden werden.
In Automatisierungslinien werden oft echtzeitfähige Feldbus-Schnittstellen eingesetzt. Echtzeit bedeutet, dass nicht nur die Übertragung selbst gesichert ist, sondern auch die zeitliche Abfolge. Das heißt, die Kommandos erreichen die einzelnen Geräte exakt in derselben Reihenfolge und in dem zeitlichen Abstand, in dem sie gesendet wurden.
Hexapod-Systeme von PI werden für die Einbindung in Automatisierungsstrecken optional mit Feldbus-Interface angeboten. Derzeit unterstützen die Hexapod-Controller EtherCAT, weitere Echtzeitprotokolle sind in Vorbereitung.
Kommunikation zwischen SPS und Hexapod-Controller

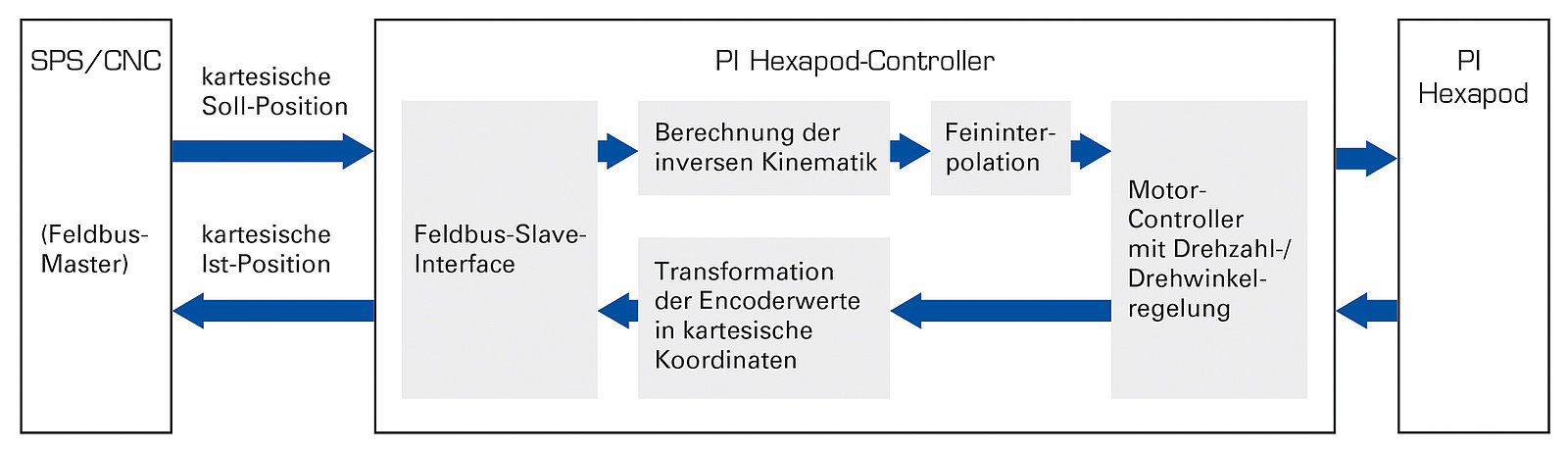
Die übergeordnete SPS arbeitet im sogenannten CSP-Modus (Cyclic Synchronous Position Mode) und kommuniziert über EtherCAT mit dem Hexapod-Controller. Sie gibt als Master zyklisch die kartesische Soll-Position für die einzelnen Achsen oder die Bahnen im Raum vor und bekommt die Ist-Positionen ebenfalls über die Feldbusschnittstelle zurückgemeldet.
Der Hexapod-Controller übernimmt alle anderen Berechnungen, die notwendig sind, um die Fahrbefehle für das parallelkinematische Sechsachssystem umzusetzen, also die Transformation der kartesischen Soll-Positionen in die Ansteuerung der Einzelantriebe. Das Hexapod‐System verhält sich am Bus wie ein intelligenter Multi‐Achs‐Antrieb.
Kommunikationsprotokoll: CANopen
Das auf EtherCAT aufsetzende Kommunikationsprotokoll ist CANopen. Während EtherCAT die echtzeitgerechte Übertragung sichert, definiert CANopen, wie die Daten übertragen werden. Die Implementierung ist dabei konform zum Standard CiA402 (IEC 61800-7-201/301) und unterstützt sowohl Prozessdatenobjekte (PDO) zur Echtzeitübertragung als auch Servicedatenobjekte (SDO) zur Parametrierung.
Durch den Einsatz standardisierter Realtime Ethernet‐Protokolle und die Verlagerung der Transformationsberechnungen auf den Hexapod‐Controller ist der Anwender unabhängig von einem bestimmten SPS‐Hersteller.
Kundenspezifische direkte Kommandierung: SPI-Schnittstelle
Die serielle Datenübertragung über die SPI-Schnittstelle ist in erster Linie dafür vorgesehen, digitalisierte Positionswerte vom und Ansteuersignale zum PI Controller zu übertragen. Die Übertragung erfolgt mit minimaler Verzögerung und Update-Raten, die der Servozykluszeit des Controllers entsprechen.
Dabei kann der Standard-Kommandointerpreter für den PI General Command Set (GCS) umgangen werden, sodass eine Konvertierung der Befehle entfällt. Für Anwender ist dies insbesondere dann interessant, wenn eigene digitale Signale zur Sollwertvorgabe in Echtzeit verknüpft werden sollen.
Alternativ dazu können auch GCS-Befehle übermittelt werden, wodurch dann der Zugriff auf die komplette Funktionalität des Controllers besteht. Außer zur Anbindung externer Steuerungen werden SPI-Schnittstellen von PI auch für die interne Datenübertragung zwischen Controller und Mechanik genutzt.