Typische Spezifikationen sind:
Linear: Geradheit/Ebenheit 0,1 µm/25 mm, Neigen/Gieren 0,5 Bogensekunden/25 mm
Rotatorisch: Radiales/Axiales Übersprechen 0,1 µm, Taumeln < 1 Bogensekunde
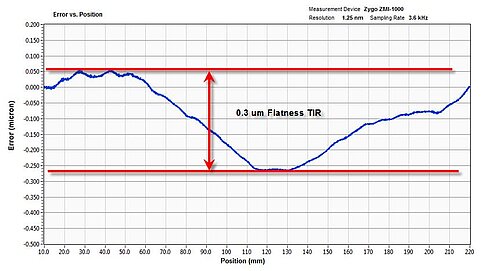
Der Bewegungsfehler über den gesamten Stellweg wird normalerweise in "Mikrometer TIR" spezifiziert. TIR bedeutet Total Indicator Reading. TIR spezifiziert die Spitze-Spitze-Messung des Bewegungsfehlers, die nicht symmetrisch zum Nullwert sein muss. Typisch erreichen Luftlagertische eine Ebenheit und Geradheit besser als 1 µm TIR über jeweils 200 mm Stellweg.