Kompakte Bauform, keine geschleppten Massen und Kabel
Kompakte Bauform, keine geschleppten Massen und Kabel
In einem Parallelkinematik-Mehrachsensystem gibt es nur eine bewegte Plattform, auf die alle Aktoren direkt einwirken. Dadurch können die dynamischen Eigenschaften der Achsen identisch ausgelegt und die bewegte Masse stark reduziert werden. Weitere Vorteile: das parallelkinematische System kann kompakter gebaut werden als seriell gestapelte bzw. verschachtelte Systeme. Die Fehler und Massen der einzelnen Achsen addieren sich nicht auf. Parallekinematische Systeme sind mit bis zu 6 Freiheitsgraden verfügbar und besitzen eine hohe Dynamik in allen Achsen durch die minimale Massenträgheit.
Parallelmetrologie: Mehrachsenmessungen gegen eine feste Referenz
Parallelmetrologie: Mehrachsenmessungen gegen eine feste Referenz
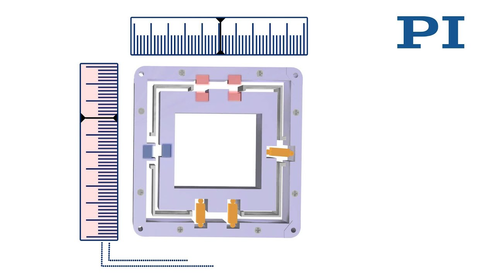
Ein mehrachsiges Verstellerdesign mit Parallelkinematik ermöglicht die Verwendung von direkter Parallelmetrologie, die Vermessung aller Freiheitsgrade der bewegten Plattform gegen eine einzige feste Referenz. Ein ungewolltes Übersprechen der Bewegung in eine andere Achse, z.B. durch äußere Krafteinwirkung, kann so detektiert und in Echtzeit aktiv ausgeregelt werden. Diese aktive Führung ermöglicht eine hohe Bahntreue im Nanometerbereich auch bei dynamischem Betrieb.
Kinematik von Mehrachsen-Kippsystemen

Kippspiegelsysteme von PI basieren auf einer parallelen Kinematik mit nur einer bewegten Plattform für alle Bewegungsrichtungen. Die Systeme erreichen eine höhere Linearität als durch Hintereinanderschalten von zwei Einachssystemen – z. B. Galvoscannern – realisierbar ist, und sind dabei sehr kompakt.
Piezogetriebene Kippspiegel und -plattformen sind sowohl für den hochdynamischen Betrieb, z. B. für Tracking, Scanning, Bildstabilisierung, Drift- und Vibrationselimination als auch für statische Positionierung von Optiken oder Proben geeignet. Sie ermöglichen einen optischen Ablenkbereich bis zu 100 mrad, extrem kurze Ansprechzeiten von wenigen Mikrosekunden sowie Auflösungen bis in den Nanoradianbereich. PI bietet ein großes Spektrum von kompakten Systemen für die Laserstrahlsteuerung bis hin zu großen Einheiten für die Astronomie.
Kippsystem mit Dreibein-Piezoantrieb (Tripod)
Die Plattform wird von drei in 120°-Abständen angeordneten Piezoaktoren angetrieben. Durch Koordinatentransformation kann die Bewegung auf die einzelnen Aktoren aufgeteilt werden.
Zusätzlich zur Kippung kann die Plattform auch linear in Z bewegt werden, was z. B. zur Korrektur optischer Laufzeitunterschiede (Phasenschieber) wichtig ist.
Folgende Gleichungen dienen zur Berechnung der Kippwinkel und des Stellwegs in Z. A, B und C sind die linearen Auslenkungen der entsprechenden Aktoren:
Kippsystem mit differenziellem Piezoantrieb (Tetrapod)
Kippsystem mit differenziellem Piezoantrieb (Tetrapod)
Die Plattform wird von zwei Paaren in 90°-Abständen angeordneter Piezoaktoren angetrieben. Die vier Aktoren werden dabei je nach Kipprichtung differenziell paarweise angesteuert. Weil die Kippachsen θX und θY orthogonal ausgerichtet sind, ist keine Koordinatentransformation notwendig.
Das Resultat ist eine hervorragende Positions-/ Winkelstabilität in einem breiten Temperaturbereich. Die differenzielle Bauform bietet wie die Dreibeinkonstruktion eine optimale Winkelstabilität in einem breiten Temperaturbereich. Bei positionsgeregelten Ausführungen ermöglicht die differenzielle Auswertung von je zwei Sensoren pro Achse eine verbesserte Linearität und Auflösung.





Dynamik eines Piezokippspiegels
Die maximale Arbeitsfrequenz eines Piezokippsystems hängt stark von seiner mechanischen Resonanzfrequenz ab. Auch den Eigenschaften des Verstärkers, Reglers und Sensors kommt eine hohe Bedeutung zu. Um die effektive Resonanzfrequenz des Systems aus Plattform und Spiegel abzuschätzen, muss zuerst das Trägheitsmoment des Spiegelsubstrats berechnet werden.


Mit der Resonanzfrequenz der Plattform (siehe >> Spezifikationen der Produkte) und dem Trägheitsmoment des Spiegelsubstrats ergibt sich die Systemresonanzfrequenz entsprechend folgender Gleichung:

