Absolutencoder
Absolutencoder werden zur Positionserfassung eingesetzt und liefern eine Information über die absolute Position einer bewegten Plattform. Dies kann z.B. optisch durch die Verwendung einer zusätzlichen Pseudo Random Code (PRC) Skala realisiert werden.
DC-Motor mit ActiveDrive (PWM)
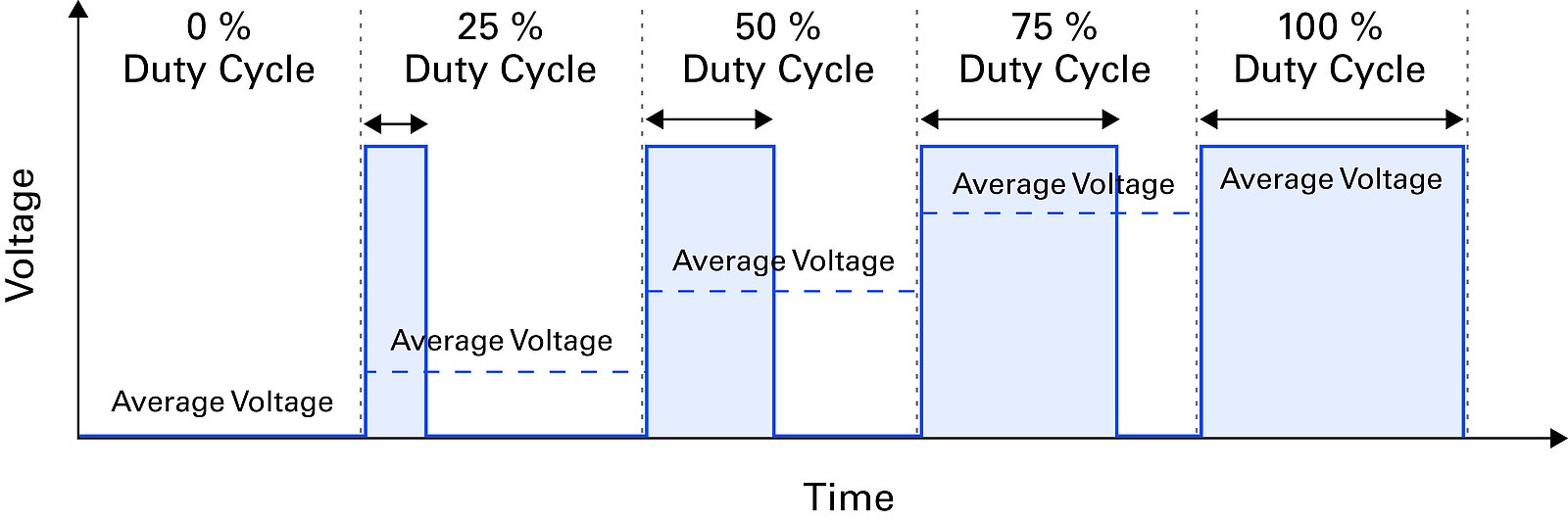
Um höhere Geschwindigkeiten zu ermöglichen, hat PI die ActiveDrive-Technologie zur Steuerung von Motoren entwickelt, deren Nennleistung die Ausgangsleistung des Controllers übersteigt. Dabei wird ein Verstärker zusammen mit dem Motor in einem abgeschirmten Gehäuse integriert. Der integrierte Verstärker wird vom Controller mit einer Pulsweitenmodulation (PWM) angesteuert. Wie in unten dargestellt, wird die Motorleistung über das Verhältnis der Ein-und Ausschaltdauer geregelt. Dies erfordert ein separates Netzteil zur Verstärkerversorgung und eine optimierte Wärmeabfuhr zur Präzisionserhaltung.
Anstiegszeit
Zeitkonstante des Controllers/Verstärkers: Die Zeit, die benötigt wird, um von 10 % auf 90 % des maximalen Spannungshubs zu kommen.
Antriebstyp
Gibt an, welche Antriebsarten durch den Controller/Treiber unterstützt werden, z. B. DC-Motoren, Piezoschreitantriebe, Piezoaktoren oder Linearmotoren.
Arbeitsraum
Die Gesamtheit aller Kombinationen von Übersetzungen und Rotationen, die der Hexapod von der aktuellen Position aus erreichen kann, wird als "Arbeitsraum" bezeichnet.
Auflösung
Auflösung in der Positionierung bezeichnet die kleinste Abstandsänderung, die vom System unterschieden werden kann. Die Auflösung von piezobasierten Positioniersystemen und Piezoaktoren ist im Prinzip unbegrenzt, weil sie nicht durch Haft- oder Gleitreibung beeinflusst wird. Stattdessen wird dort das Äquivalent zum Elektronikrauschen spezifiziert. Werte sind typische Ergebnisse (RMS, 1 σ).
Bahnsteuerung
Vorkehrungen zur Vermeidung von Abweichungen von der vorgegebenen Trajektorie; können passiv (z.B. Festkörpergelenkführung) oder aktiv (z.B. durch zusätzliche aktive Achsen und Sensoren) sein.
Bandbreite
Max. Betriebsfrequenz eines Piezotreibers; der angegebene Messwert ist die Frequenz in Kilohertz, bei der die Amplitude um -3 dB abgefallen ist. Großsignalwerte bezogen auf maximale Ausgangsspannung. Kleinsignalwerte bei Ausgangsspannung von 10 Vpp. Die Werte sind im Aussteuerdiagramm des Controllers / Verstärkers abzulesen.
Bedienersoftware und Funktionen
PI liefert mit allen Controllern ein umfangreiches Softwarepaket aus, unter anderem Bedienersoftware und Programmierunterstützung, wie: PIMikroMove®, PI General Command Set (GCS), Treiber für NI LabVIEW, dynamische Bibliotheken für Windows und Linux. Kompatibel mit µManager, MATLAB, u.a.. Funktionsgenerator. Linearisierung. Datenrekorder. Auto Zero. Trigger I/O. Parametervorgabe per Software.
Betriebsspannung
Erlaubter Eingangsspannungsbereich, ggf. auch Eingangsfrequenz, für die Versorgung des Geräts.
Betriebstemperaturbereich
Im maximal zulässigen Temperaturbereich kann das Gerät in jedem Fall sicher betrieben werden. Um ein internes Überhitzen zu vermeiden, steht jedoch ab einer bestimmten Temperatur (maximale Betriebstemperatur unter Volllast) nicht mehr die volle Leistung zur Verfügung. Wenn die Betriebstemperatur sich ändert, kann eine Nachkalibrierung oder Nullpunktjustierung erforderlich sein. Leistungsspezifikationen im Datenblatt gelten nur für Raumtemperatur.
Bürstenloser DC-Motor (BLDC) / Synchron-Servomotor (SSVM)
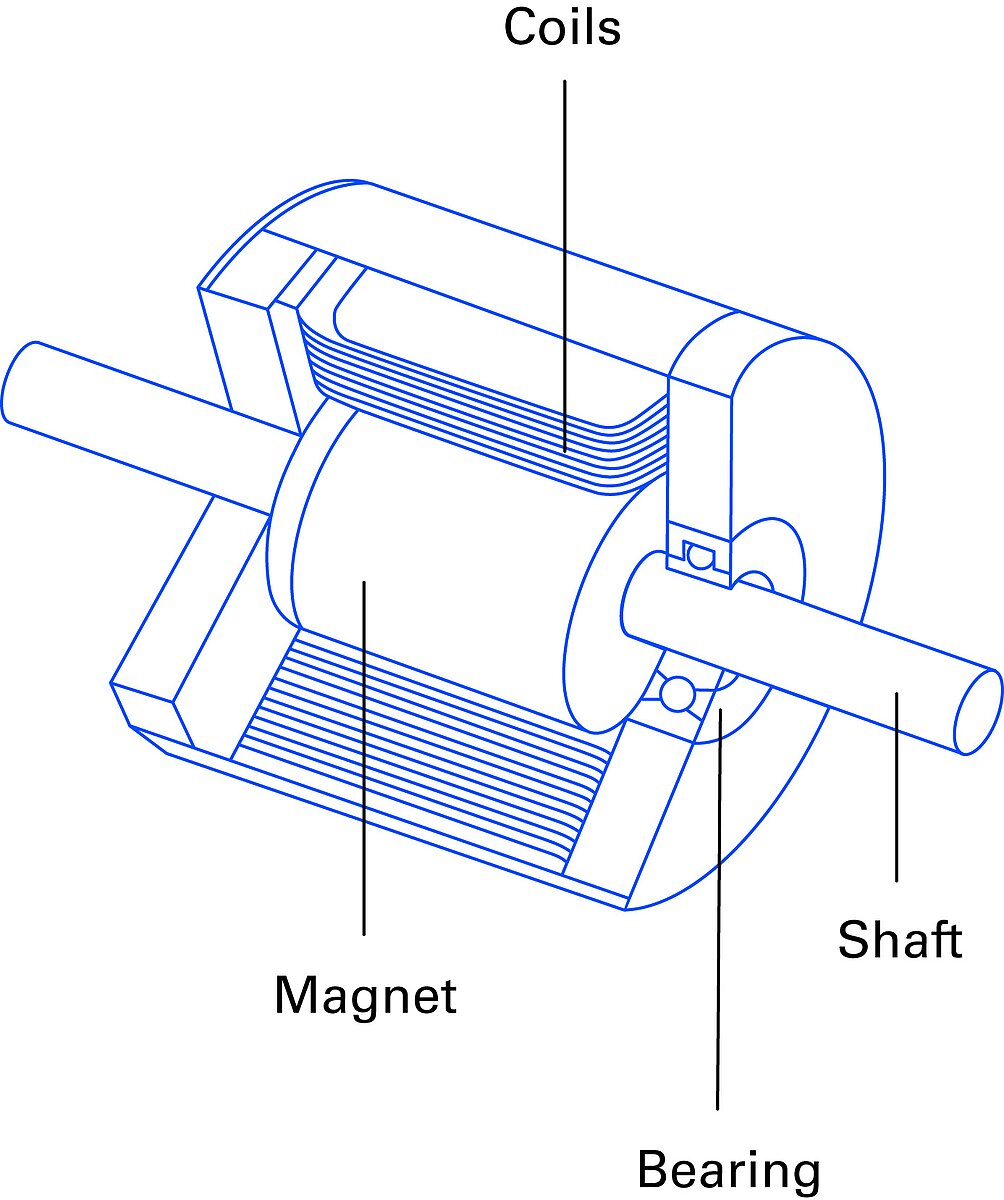
Mit BLDC-Motoren (bürstenloser Gleichstrom, BrushLess Direct Current) bzw. SSVM (Synchron-Servomotoren) ergeben sich durch eine bürstenlose Kommutierung große Vorteile gegenüber bürstenbehafteten DC-Motoren:
- Die Lebensdauer wird hauptsächlich durch die Lager begrenzt und beträgt mehrere zehntausend Stunden. Die Motoren arbeiten also zuverlässiger.
- Durch die bürstenlose Ausführung kann bei gleicher Leistung ein kleinerer und leichterer sowie wartungsärmerer und effizienterer Motoraufbau realisiert werden. Dadurch ergibt sich ein großes Verhältnis von Drehmoment zu Motorgröße.
- Die elektronische Kommutierung ermöglicht eine hohe Dynamik bei geringer Wärme und wenig Vibrationen.
Aus diesen Gründen finden BLDC- bzw. SSVM-Motoren deshalb gegenüber DC-Motoren vorwiegend auch im industriellen Umfeld Einsatz.
Datenrekorder
Werkzeug zur Analyse von Daten und Messwerten. Es speichert Daten aus verschiedenen Datenquellen, wie z. B. Positionsrückmeldungen analoger Eingänge und zeigt diese als Funktion der Zeit, wodurch eine schnelle Visualisierung ermöglicht wird.
Dauerstrom
Strom steht über längere Zeit zuverlässig zur Verfügung. Gemessener Wert. Für Mehrachsen-Controller erfolgt die Angabe pro Kanal.
DC-Motor (DC)
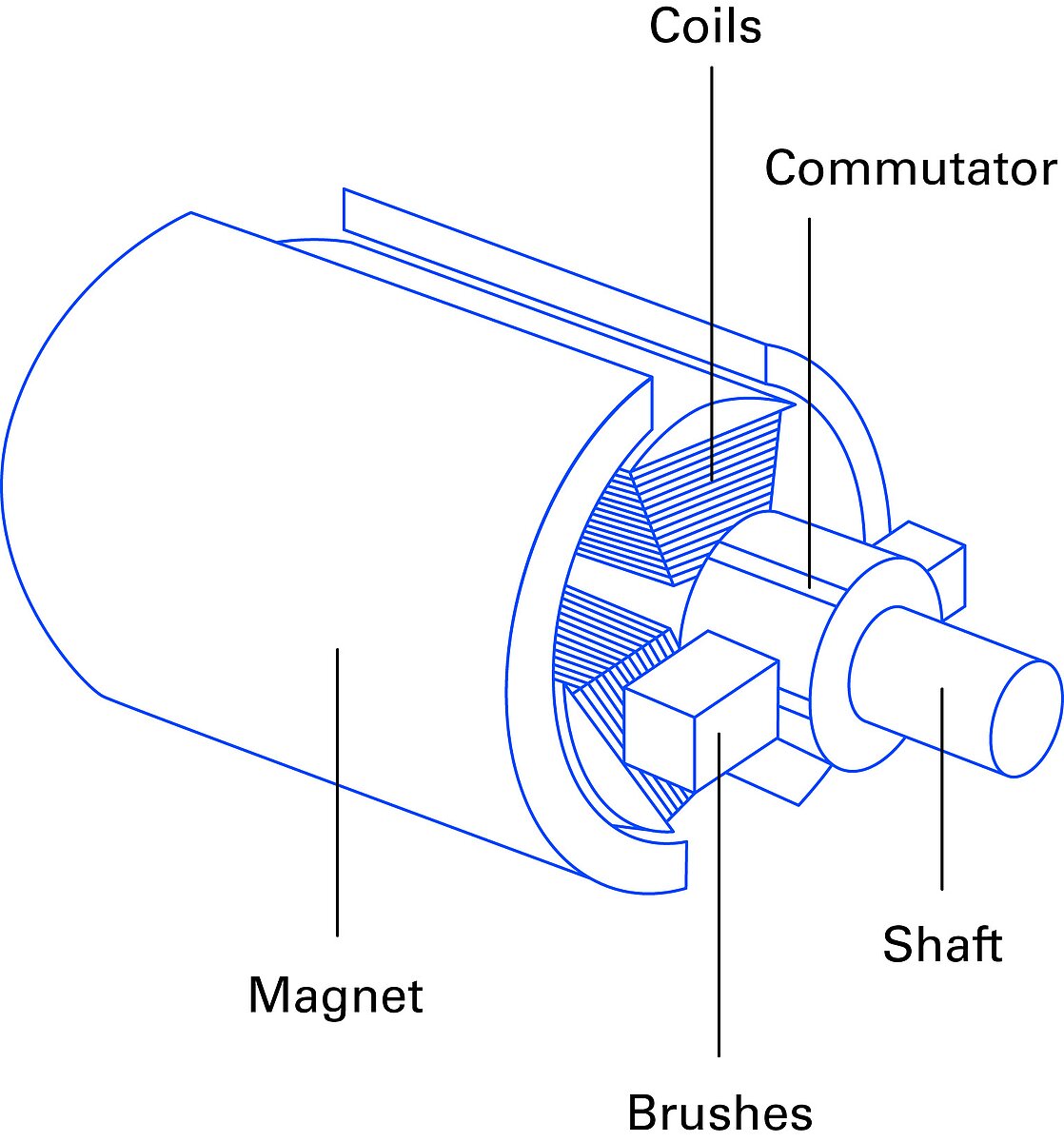
Gleichstrommotoren bieten eine gute Dynamik über einen großen Drehzahlbereich, geringe Wärmeentwicklung sowie einen gleichmäßigen und schwingungsfreien Betrieb. Für eine beispielhafte Positionierlösung ergeben sich mit einer Spindelsteigung von 1 mm/Umdrehung typische Verfahrgeschwindigkeiten um 50 mm/s. Nachteilig sind die zur Kommutierung des Motors eingesetzten verschleißbehafteten Bürsten, die die Lebensdauer auf 1000 - 5000 Stunden begrenzen.
Ein Einsatz im Vakuum ist nur bis 10-6 hPa möglich, da sonst die Luftfeuchtigkeit fehlt, den die zur Kommutierung eingesetzten Kohlebürsten benötigen. Außerdem kommt es zum Abrieb von Kohlestaub, was problematisch für Einsätze im Vakuum, im Reinraum oder bei optischen Anwendungen ist.
Dehnmessstreifen (DMS)
Dehnmessstreifen bestehen aus einem dünnen Metalldraht auf einer Folie (DMS) oder einer Halbleiterfolie (PRS), die auf dem Piezoaktor oder dem Führungssystem (Hebel, Flexure) eines Festkörpergelenk-Positionierers aufgebracht ist. Diese Art der Positionsmessung erfolgt mit Kontakt und indirekt, da die Position der Bewegungsplattform von einer Messung am Hebel, der Führung oder dem Piezostapel abgeleitet wird. Dehnmesssensoren leiten die Positionsinformation von ihrer Ausdehnung und der daraus resultierenden Änderung des Widerstands ab. Vollbrückenschaltungen mit mehreren Dehnmessstreifen je Achse verbessern die thermische Stabilität.
Digitale dynamische Linearisierung
Digitale Dynamische Linearisierung (DDL) beschreibt eine iterative Methode zur Minimierung des Positionierungsfehlers. Neben anderen piezoelektrischen Bewegungseffekten reduziert DDL beispielsweise die Phasenverschiebung der kommandierten und ausgeführten Trajektorie in wiederholten periodischen Bewegungsprofilen. Dies ist relevant für Scanning-Anwendungen, bei denen es darum geht, eine bestimmte Position zu identifizieren und präzise wieder anzufahren oder für Anwendungen, bei denen die Bahnkurve für mehrere Bearbeitungsschritte genau eingehalten werden muss.
Direktmetrologie
Die Positionsmessung erfolgt mit höchster Genauigkeit direkt an der bewegten Plattform, so dass Nichtlinearität, mechanisches Spiel oder elastische Deformation keinen Einfluss auf die Positionsmessung haben. Dies wird durch berührungslose optische Linearencoder erreicht. Präzisions-Positioniersysteme verwenden unterschiedliche Encodertypen als Positionssensor: Inkrementelle Encoder mit unterschiedlichen Genauigkeitsstufen, absolut messende Encoder, die zusätzlich das Referenzieren beim Wiedereinschalten einer Maschine überflüssig machen, und kapazitive Sensoren für Stellwege unter 2 mm.
Druck- / Zugbelastbarkeit (in Stellrichtung)
Gibt die maximalen Kräfte an, die entlang der aktiven Achse im Piezosystem aufgebracht werden können. Wird begrenzt durch das piezoelektrische Material und die Festkörpergelenksführung. Bei größeren Kräften kann es zu Beschädigungen des Piezoaktors, der Festkörper oder auch des Sensors kommen. Die Limitierung der Kraft muss in dynamischen Anwendungen berücksichtigt werden.
Beispiel: Die im Sinusbetrieb erzeugten dynamischen Kräfte bei 500 Hz, 20 µm Spitze-zu-Spitze und 1 kg bewegter Masse liegen bei ungefähr ±100 N.
Eingangsspannungsbereich
Für Piezo-Controller und -Treiber. Empfohlener Bereich von -2 bis 12 V. Der übliche Verstärkungsfaktor von 10 bewirkt eine Ausgangsspannung von -20 bis 120 V. Die meisten PI-Controller ermöglichen einen Eingangsspannungsbereich von -3 bis 13 V.
Elektrische Kapazität
Die Piezo-Kapazitätswerte in den technischen Daten sind Kleinsignalwerte (gemessen bei 1 V, 1000 Hz, 20 °C, lastfrei). Großsignalwerte liegen bei Raumtemperatur um einen Faktor 1,3 bis 1,6 höher. Die Kapazität von Piezoelektrika ändert sich mit der Amplitude, Temperatur und Last auf bis zu 200 % der unbelasteten Kleinsignalkapazität bei Raumtemperatur. Detaillierte Informationen zu Leistungsanforderungen sind in den Aussteuerungskurven für die Piezoverstärker und Controller zu finden.
Encoder
Ein Encoder wird zur Positionsbestimmung verwendet. Grundsätzlich unterscheidet man Linear- und Rotationsencoder, die je nach Aufbau inkrementell oder absolut arbeiten.
Energierückgewinnung
Geschalteter Verstärker (class-D), bei dem die Pulsweite des Ansteuersignals moduliert (PWM) und dadurch die Ausgangsspannung geregelt wird. Eine patentierte Schaltung zur Energierückgewinnung speichert beim Entladen des Piezoaktors einen Teil der zurückfließenden Energie in einem kapazitiven Speicher und stellt sie für den nächsten Ladevorgang wieder zur Verfügung. Der Verstärker reduziert die Leistungsaufnahme um bis zu 80 % im Vergleich zu linearen Piezoverstärkern, läuft kühler und sorgt für mehr Stabilität. Piezotreiber mit Energierückgewinnung sind ideal für hochdynamische Scan- und Schaltanwendungen.
EtherCAT® Fieldbus-Schnittstelle
EtherCAT® (Ethernet for Control Automation Technology) ist ein offenes, Ethernet-basiertes Fieldbus-System, das in Echtzeit arbeitet. EtherCAT® ist ein eingetragenes Warenzeichen und eine patentierte Technologie, lizenziert von der Beckhoff Automation GmbH in Deutschland.
Hexapod-Controller von PI unterstützen EtherCAT®. Die erforderliche Koordinatentransformation für die Parallelkinematik wird vom Hexapod-Controller durchgeführt und beeinträchtigt nicht die SPS.

Festkörpergelenksführungen
Die Bewegung eines Festkörpers basiert auf der elastischen Deformation eines Festkörpers, wodurch Haft-, Roll- oder Gleitreibung vermieden wird. Festkörperelemente wie Gelenke oder Führungssysteme zeichnen sich durch hohe Steifigkeit und hohe Belastbarkeit aus und sind kaum schlag- oder vibrationsempfindlich. Sie sind verschleiß- und wartungsfrei, vakuum-kompatibel, funktionieren in einem großen Temperaturbereich und benötigen keine Schmierstoffe.
Geregelter Betrieb
Durch eine integrierte Positionsrückmeldung können Motoren in Regelung betrieben werden. Die kommandierte und die tatsächlich erreichte Position werden gemessen und miteinander verglichen. Regeltechniken werden eingesetzt um die Zielposition optimal zu erreichen, für eine hohe Positionsauflösung, für gleichbleibende Vorschubgeschwindigkeit und große dynamische Geschwindigkeits- und Beschleunigungsbereiche.
Geregelter Betrieb von Piezo-Aktoren und -Systemen
Piezo-Servocontroller verfügen über zusätzliche Schaltungen zur Positionserfassung und Servosteuerung um Nichtlinearität, Hysterese und Kriechen zu kompensieren. Ein analoges Signal kontrolliert die Piezoauslenkung. Abhängig von Piezomechanik und Sensorart ist damit eine Positioniergenauigkeit und Wiederholbarkeit im Nanometerbereich möglich. Hochauflösende Positionssensoren sorgen für optimale Positionsstabilität und schnelles Ansprechverhalten im Nanometerbereich. Die integrierten achsenselektiven Notchfilter (Kerbfilter) verbessern die Stabilität und ermöglichen einen breitbandigeren Betrieb, der näher an der Resonanzfrequenz der Mechanik liegt.
PI-Piezotreiber für PICMA®-Aktoren verfügen über einen Ausgangsspannungsbereich von bis zu -30 bis +135 V um dem Servocontroller genügend Kompensationsspielraum z.B. bei Änderung der Last zu geben.
Siehe >> ungeregelter Betrieb, >> kapazitive Sensoren, >> Dehnmessstreifensensor.
Getriebe
Mit Getrieben können Geschwindigkeit und Drehmoment eingestellt werden. Dabei ist das Übersetzungsverhältnis entscheidend, also der Quotient zwischen der Drehzahl und dem Getriebeeingang. Die Geschwindigkeit wird sozusagen am Getriebeausgang definiert. Man spricht von Untersetzung, wenn dieses Verhältnis größer als eins ist, wodurch sich eine geringere Drehzahl bei größerem Drehmoment ergibt. Umgekehrt verhält es sich für höhere Geschwindigkeiten. Typische Getriebearten sind beispielsweise Schnecken-, Stirnrad-, Planeten-, Kegelrad- und Riemengetriebe.
Siehe >> Schneckengetriebe, >> Kegelradgetriebe, >> Stirnradgetriebe, >> Planetengetriebe, >> Harmonic Drive Getriebe, >> Riemengetriebe.
Getriebemotoren
In der Präzisionspositionierung finden Getriebe vorwiegend Einsatz, um eine geringere Drehzahl bei größerem Drehmoment und höherer Auflösung bereitzustellen. Bei solchen Langsamfahrten dreht sich der Rotor durch die Getriebeübersetzung vergleichsweise schnell. Ohne Getriebe könnten aufgrund der geringen Rotordrehzahl unerwünschte Rastmomente, sogenanntes Cogging, auftreten. Zudem unterstützt ein Getriebe bei vertikalen Anwendungen die Selbsthemmung. Oft ist nur geringer Regelungsaufwand erforderlich, da der Motor die Last auf der Bewegungsplattform aufgrund des Getriebes nur noch um das Quadrat des Übersetzungsverhältnisses reduziert erfährt.
Eine Ausführung mit Getriebe ist aber spielbehaftet und zusätzliche Reibung verringert die Effizienz. Getriebehersteller bieten deshalb oft eine geeignete Schmierung an, um eine vorgesehene Lebensdauer zu garantieren. Die Lebensdauer hängt dabei maßgeblich von der Eingangsdrehzahl, dem Abtriebsdrehmoment und den Betriebs-, Umgebungs- und Einbaubedingungen ab. In Sonderlösungen erhöhen spezielle Sinter-, Kugel-, oder Keramiklager sowie Metallzahnräder und Sonderfette die Lebensdauer.
In spindelgetriebenen Positioniersystemen wirkt streng genommen auch die Antriebsspindel als Getriebe, da abhängig von der Spindelsteigung eine Geschwindigkeitsanpassung – auf Kosten des Drehmoments – erfolgt. So bewegt sich eine Bewegungsplattform bei einer Spindelsteigung von 2 mm/Umdrehung gegenüber einer Spindelsteigung von 1 mm/Umdrehung doppelt so schnell bei halbem Drehmoment. Für einige Anwendungen ist aber ein eigenes Getriebe zwischen Motor und Antriebsspindel erforderlich. Dafür setzt PI unterschiedliche Getriebetypen ein.
Gewindespindel
Gewindespindeln können sehr hohe Auflösungen bei gleichmäßigem Lauf erreichen und werden oft durch Federn vorgespannt, um das Umkehrspiel zu minimieren. Dadurch entsteht Gleitreibung, wodurch die Spindel selbsthemmend wirkt. Dies reduziert jedoch die Geschwindigkeit und die Lebensdauer.
Haltekraft
Krafteinwirkung auf die Bewegungsplattform, die keine Bewegung hervorruft, auch im unbestromten Zustand.
Harmonic Drive Getriebe
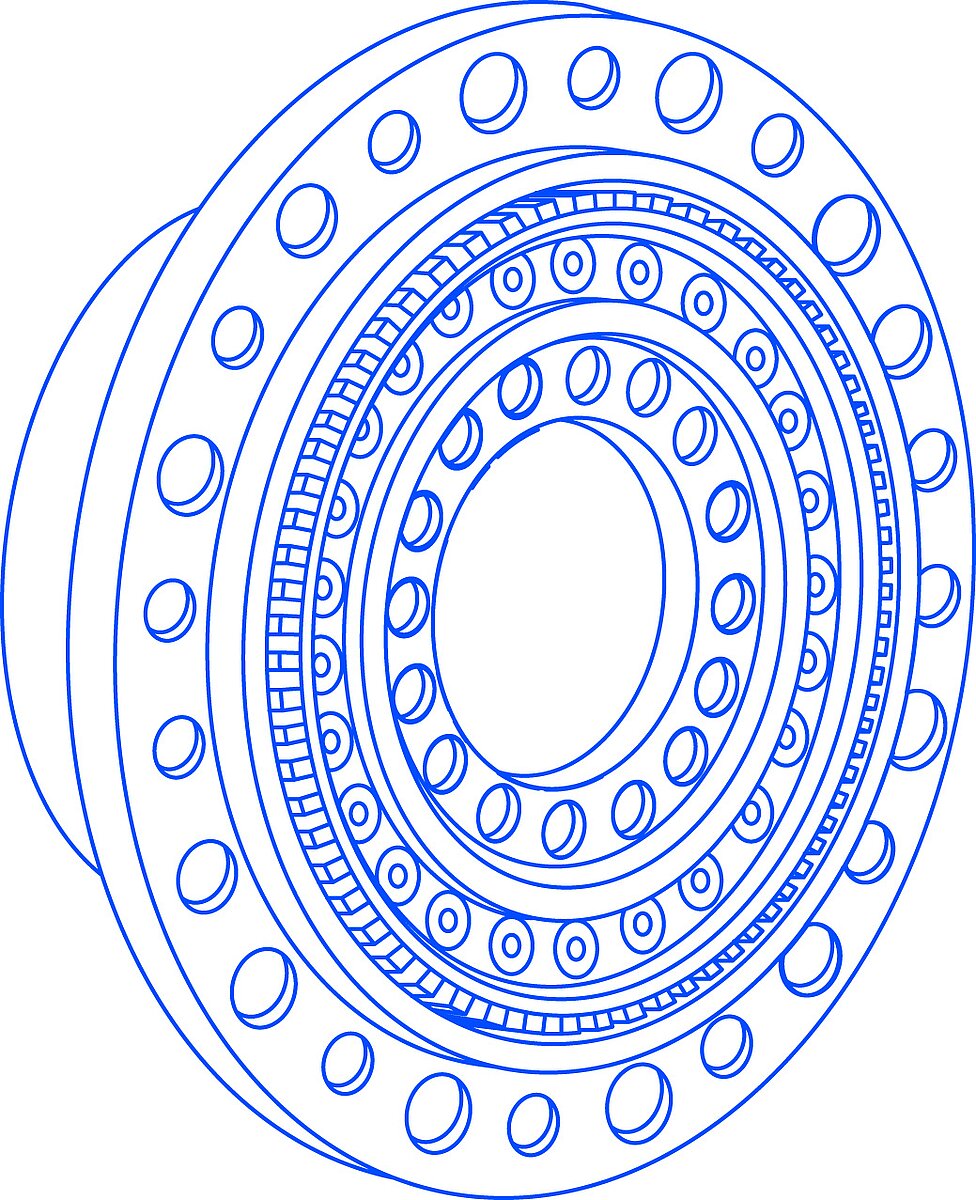
Harmonic Drive Getriebe zeichnen sich durch ein elastisches Übertragungselement aus, das für hohe Übersetzungsverhältnisse, hohe Drehmomentkapazität, hohe lineare Torsionssteifigkeit, hohe Wirkungsgrade und Spielfreiheit sorgt. Das elastische Übertragungselement ist eine elliptische Scheibe, die eine dünnwandige Stahlbuchse mit Außenverzahnung verformt. Die Stahlbuchse sitzt innerhalb eines Außenrings mit Kugellager und Innenverzahnung. Somit greifen bei Verformung im Bereich der größeren Ellipsenachse Innen- und Außenverzahnung spielfrei ineinander. Zusätzlich bieten Harmonic Drive Getriebe die Möglichkeit einer zentralen Hohlwelle, z.B. für Kabel, Wellen oder Laserstrahlen. Der komplexe und gleichzeitig kompakte sowie wartungsfreie Aufbau machen diese Getriebe allerdings vergleichsweise teuer. Für Sonderlösungen setzt PI manchmal Harmonic Drive Getriebe ein, um aufgrund der Spielfreiheit besonders hohe Positionier- und Wiederholgenauigkeiten zu erreichen.
ID-Chip
Im Stecker vieler Piezotische befindet sich ein ID-Chip. Wenn der Positionierer werkseitig mit einem digitalen Controller kalibriert wird, werden die Kalibrationsdaten zusammen mit spezifischen Produktinformationen auf dem ID-Chip gespeichert. Beim Einschalten lesen digitale Controller die Daten vom ID-Chip des angeschlossenen Verstellers. Positionierer, deren ID-Chip die Kalibrationsdaten enthält, können deshalb ohne Neukalibration an eine beliebige geeignete digitale Elektronik angeschlossen werden.
Inkrementeller Encoder
Inkrementelle Encoder erzeugen bei Bewegung Impulse, die vom Controller gezählt werden. Im Gegensatz zu Absolutencodern handelt es sich dabei um eine relative Positionsbestimmung. Um die absolute Position zu bestimmen, muss zusätzlich auf ein End- oder Referenzschaltersignal referenziert werden.
Kapazitive Grundlast (intern)
Für geschaltete Verstärker. Stabilisiert die Ausgangsspannung auch ohne angeschlossene kapazitive Last (Piezoaktor). Die mögliche Ausgangsleistung eines Piezocontrollers / Treibers hängt von den internen und externen kapazitiven Lasten ab.
Kapazitiver Sensor
Kapazitive Sensoren ermöglichen dem Anwender eine kontaktlose Messung, bringen wenig Energie in das Piezoantriebssystem ein und bauen sehr flach. Ihre direkte Positionsmessung eliminiert Drifteffekte für Verfahrbereiche von 10 μm bis zu ca. 2 mm. Der Aufbau besteht aus zwei leitenden Flächen: Durch die Ansteuerung mit hochfrequentem Wechselstrom entsteht ein homogenes elektrisches Feld zwischen den beiden Flächen. Das Gesamtsystem aus Positioniertisch, Sensorik und Elektronik gewinnt an Leistungsfähigkeit und Präzision. Kunden aus der Halbleiterindustrie schätzen darüber hinaus vor allem die kleine Bauweise und Variabilität in der Bauform sowie die fehlende Wärmeentwicklung im System.
Siehe >> Sensor-Linearisierung.
Kegelradgetriebe
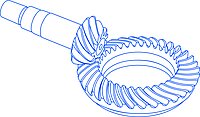
Kegelradgetriebe sind aus einem Kegelritzel und einem Zahnrad mit jeweils gewinkelten Zähnen aufgebaut. Ähnlich wie beim Schneckengetriebe wird die Kraft im rechten Winkel übertragen, aber erreicht eine höhere Drehmomentkapazität. Hohe Übersetzungen lassen sich nur durch zusätzliche Stirnradstufen erreichen. Vorteilhaft ist der auftretende Rollkontakt. Dadurch sind Kegelradgetriebe verschleißärmer und effizienter als Schneckengetriebe. Allerdings sind sie meist auch teurer. PI setzt Kegelradgetriebe für Drehtische in Sonderlösungen ein.
Kippspiegel
Kippspiegel, schnelle Lenkspiegel und Kipp-Plattformen werden z.B. für Aktive Optiken und zur Strahlablenkung in der Laserbearbeitung und Laserstrahlsteuerung verwendet. Diese speziellen Piezotische bieten meist zwei orthogonale Kippachsen mit gemeinsamem Drehpunkt. Ihr parallelkinematischer Aufbau ermöglicht eine identische Leistung in beiden Kippachsen, mit einem gemeinsamen festen Drehpunkt und erhält die Polarisationsrichtung. Die Bandbreite, Resonanzfrequenzen und Beschleunigung sind oft höher als bei Voice-Coil oder Galvo-Scannern. Kippspiegel sind aufgrund ihrer Festkörpergelenkführung verschleißfrei.
Kleinste Schrittweite
Die kleinste Bewegung, die wiederholt ausgeführt werden kann, wird kleinste Schrittweite oder typische Auflösung genannt, und wird von Messungen festgelegt. Die Datentabelle zeigt typische gemessene Werte. Die kleinste Schrittweite weicht in den meisten Fällen von der rechnerischen Auflösung ab, die in Zahlenwerten noch wesentlich kleiner ausfallen kann.
Siehe auch >> rechnerische Auflösung.
Koordinatensystem
Die Positionsanzeigen, die Bewegungsrichtung und der Drehpunkt für die Bewegungsplattform eines Hexapoden werden von Koordinatensystemen festgelegt. Diese Koordinatensysteme sind immer rechtshändige Systeme.
Um die Bewegungstrajektorie den Erfordernissen der Anwendung perfekt anpassen zu können, ist es möglich, verschiedene Koordinatensysteme zu definieren, die sich beispielsweise auf die Position eines Werkstücks oder Werkzeugs beziehen.
Kreuzrollenführung
Kreuzrollenführungen sind vergleichsweise steif und kommen mit geringer Vorspannung aus. Dies reduziert Reibung bei hoher Belastbarkeit und sorgt für hohe Führungsgenauigkeit und gleichmäßigen Lauf. Ein Auswandern der Wälzlager lässt sich mithilfe einer zusätzlichen Käfigzwangssteuerung verhindern. Dadurch verkürzt sich aber der erreichbare Stellweg bei gleicher Achsenlänge.
Kriechen
Eine im Laufe der Zeit entstehende, ungewollte Veränderung der Auslenkung von Piezoaktoren.
Kugelumlaufführung
Kugelumlaufführungen sind bereits von ihrem Aufbau her unempfindlich gegenüber dem Auswandern der Wälzlager. Sie eignen sich somit beispielsweise für Hochpräzisionsachsen, bei denen kleine Bereiche häufig abgescannt werden. Durch korrekte Montage bieten sie eine hohe Belastbarkeit bei gleichzeitig hoher Lebensdauer, Wartungsfreiheit und Führungsgenauigkeit.
Kugelumlaufspindel
Bei Kugelumlaufspindeln entsteht nur Rollreibung, wodurch sie sich gegenüber Gewindespindeln durch höhere Geschwindigkeiten, Antriebsleistungen und Lebensdauern auszeichnen. Jedoch wirken sie nicht selbsthemmend. Das Umkehrspiel kann durch Abstimmen des Kugeldurchmessers und des Gewindegangprofils minimiert werden.
Ladungsgesteuerter Piezoverstärker
Das Verstärkerprinzip basiert auf der Ladungssteuerung. Hierbei steuert die angelegte Spannung die Ladungsmenge, die auf den Piezoaktor übertragen wird. Das Ergebnis ist eine wiederholbare, sehr lineare Auslenkung des Piezoaktors im hochdynamischen Betrieb ohne dass eine zusätzliche Positionsmessung notwendig ist. Die typische Hysterese in der Piezoauslenkung, wie sie bei Spannungsverstärkern auftritt, beträgt hier nur etwa 2 %.
Insbesondere bei hochdynamischen Anwendungen wird empfohlen, die Piezotemperatur zu überwachen, um die Piezoaktoren vor Übertemperaturschäden zu schützen.
Linearencoder
Linearencoder messen die Position direkt an der bewegten Plattform. Dadurch wird in der Regel eine höhere Genauigkeit gegenüber Rotationsencodern erzielt, da Nichtlinearitäten, mechanisches Spiel und elastische Deformation keinen Einfluss haben.
Linearisierung
Digitale Piezocontroller bieten die höchste Positioniergenauigkeit durch zusätzliche Linearisierungsalgorithmen mit Polynomen höherer Ordnung. Linearitätsabweichungen kapazitiver Sensoren liegen dadurch unter 0,01 %.
Siehe >> Digitale Dynamische Linearisierung, >> Sensor-Linearisierung.
Linearitätsabweichung
Abweichung in Bewegungsrichtung von der gemessenen Position zur kommandierten Position (Positioniergenauigkeit). Gemessen mit einem externen, rückführbaren Messmittel. Der Wert wird als prozentualer Anteil des gesamten Messbereichs angegeben.
Messung der Linearitätsabweichung: Die Soll- und gemessenen Istwerte der Positionen werden miteinander verglichen, eine Gerade durch den ersten und letzten Datenpunkt gelegt und die maximale absolute Abweichung bestimmt. Eine Linearitätsabweichung von 0,1 % entspricht damit einem Fenster von ±0,1 % um die ideale Gerade. Beispiel: Eine Linearitätsabweichung von 0,1 % über einen Messbereich von 100 µm ergibt eine mögliche maximale Abweichung des Messwertes zum Istwert von 0,1 µm.
Linearkugelführung
Linearkugelführungen erfordern exakte Toleranzen zwischen Führung und Lager, um das Spiel und die Reibung möglichst gering zu halten. Dies begrenzt die Belastbarkeit. Sie eignen sich aufgrund des einfachen Aufbaus nur für kostengünstige Anwendungen mit vergleichsweise geringen Anforderungen.
Linearmotor
Ein Linearmotor ist ein elektromagnetischer Direktantrieb, der eine geradlinige Bewegung erzeugt. Der Hub eines Linearmotors ist praktisch unbegrenzt. Zum Bewegen und Positionieren wird immer ein lineares Wegmesssystem benötigt; der ungeregelte Betrieb eines Linearmotors ist nicht möglich. Der Linearmotor benötigt keine mechanischen Kopplungselemente, wie sie bei Servomotoren benötigt werden, um die Rotation des Motors in eine Linearbewegung zu übersetzen. Üblicherweise kommen 3-Phasen Motoren zum Einsatz.
Typische Anwendungen sind in der Elektronik- und Halbleiterindustrie, der Medizin- und Biotechnologie, bei Werkzeugmaschinen mit einem starken Fokus auf Laserschneiden, aber auch in allen anderen Bereichen, wo Präzision, Dynamik und Produktivität von Bedeutung sind, zu finden.
Linearverstärker / -treiber
Die meisten Piezoverstärker verwenden Linearverstärker (Klasse AB) zur Erzeugung der Ausgangsspannung. Im ungeregelten (spannungsgesteuerten) Piezobetrieb wird die Ausgangsspannung des Verstärkers über ein analoges Eingangssignal gesteuert, das optional mit einem DC-Offset kombiniert wird.
Magnetische Lager
Die magnetische Levitation ermöglicht hervorragende Führungsgenauigkeit in der Ebene sowohl linear als auch rotativ. Ebenheitsabweichungen werden von hochgenauen berührungslosen Sensoren gemessen und ausgeregelt. Im Gegensatz zu den ebenfalls hochgenauen Luftlagern können magnetische Lager auch im Vakuum verwendet werden.
Max. Querkraft
Maximale Querkraft senkrecht zur Stellrichtung. Bei Piezosystemen wird die Querkraft durch den Piezoaktor und die Festkörpergelenksführung begrenzt. Bei Kreuztischen begrenzt die Druck- / Zugkraft des jeweils orthogonalen Moduls (in seiner Stellrichtung) die zu tolerierende Querkraft.
NEXACT® Piezoschreitantrieb
Präziser Piezomotor, der mittels Piezo-Biegeelementen einen Läufer bewegt. Die Antriebe sind sehr kompakt und erreichen relativ hohe Geschwindigkeiten im Bereich von 10 mm/s und Kräfte bis zu 10 N. Die geeignete Auswahl der Piezoelemente optimiert Schrittweite, Klemmkraft, Geschwindigkeit und Steifigkeit für die jeweiligen Anforderungen.
NEXLINE® Piezoschreitantrieb
Hochlast-Piezomotor, der Piezo-Klemm- und Scheraktoren kombiniert, um einen Läufer zu bewegen. Die Antriebe besitzen besonders hohe Kräfte und Steifigkeiten von mehreren 100 N. Sie können im Bereich von wenigen Mikrometern Schwingungen mit Nanometer-Auflösung dynamisch kompensieren. Die Antriebe sind für Positionier- und Haltekräfte bis 800 N ausgelegt und arbeiten mit Geschwindigkeiten von etwa 1 mm/s.
P
Parallelkinematik, Hexapoden
Parallelkinematische Piezotische
Parallelmetrologie
Patente
PICA / PICA Power
PICMA® Multilayer-Piezoaktoren
PICMAWalk
Piezoelektrischer Trägheitsantrieb
PiezoMove®
Piezoresistiver Sensor (PRS)
Piezoverstärker der Klasse D
PiezoWalk® Schreitantrieb
PIglide Luftlagertechnologie
PILine® Ultraschall-Piezomotoren
PIMag Magnetische Linearmotoren
PIMag Voice-Coil
PIMikroMove®
PIRest
Pivotpunkt
Planetengetriebe
Profilgenerator
Pulsweitenmodulation (PWM)
PZT
Parallelkinematik, Hexapoden
Hexapoden sind parallelkinematische Systeme mit sechs Antrieben, die mit einer einzigen Plattform direkt verbunden sind. Dadurch können Anwender automatisiert Objekte über alle Freiheitsgrade, X, Y, Z und rotatorisch, hochgenau positionieren, je nach Antrieb im Mikrometerbereich oder darunter. Das parallelkinematische System ist sehr steif, bei gleichzeitig geringem bewegten Gewicht und kann bei entsprechender Auslegung Lasten von bis zu mehreren Tonnen tragen. Anwender können das Bezugskoordinatensystem frei wählen und mittlerweile sind Hexapoden zusammen mit Arbeitern an Produktionslinien zu finden. Über EtherCAT bindet der Anwender das System in die Automatisierungslandschaft ein.

Parallelkinematische Piezotische
Die optimale Bahntreue erreichen Piezotische mit parallelkinematischem Aufbau, die Kapazitivsensoren für Parallelmetrologie nutzen. In einem Parallelkinematik-Mehrachsensystem gibt es nur eine Bewegungsplattform, auf die alle Aktoren direkt einwirken. Dadurch können die dynamischen Eigenschaften der Achsen einer Ebene identisch ausgelegt und die bewegte Masse stark reduziert werden. Weitere Vorteile der parallelen Kinematik liegen darin, dass das System kompakter gebaut werden kann als seriell gestapelte, und sich die Fehler der einzelnen Achsen nicht aufaddieren. Der Einsatz von mehrachsigen Nanopositioniersystemen mit Direktmetrologie ermöglicht jederzeit ein gleichzeitiges Messen aller Freiheitsgrade gegenüber einer gemeinsamen festen Referenz. In solchen Systemen wird unerwünschtes Übersprechen der Bewegung in eine andere Achse sofort detektiert und in Echtzeit aktiv ausgeregelt. Dieses Konzept der aktiven Führung ermöglicht eine hohe Bahntreue im Nanometerbereich, auch im dynamischen Betrieb.
Parallelmetrologie
Jeder Sensor misst die Position der gleichen Bewegungsplattform in dem jeweiligen Freiheitsgrad. Damit wird das Übersprechen (Crosstalk) aller Achsen innerhalb des Regelkreises gehalten und so eine automatische Korrektur ermöglicht.
PICA / PICA Power
PICA Piezoaktoren wurden speziell für den Dauerbetrieb mit höchsten Anforderungen entwickelt. PICA Power Aktoren sind auch für Arbeitsbedingungen mit hohen Temperaturen optimiert.
Alle verwendeten Materialien sind speziell auf Robustheit und Lebensdauer abgestimmt. Laufleistungstests mit PICA-Antrieben bewiesen stets gleichbleibende Leistung, selbst nach Milliarden (1.000.000.000) Zyklen. Die Kombination aus hoher Auslenkung und geringer elektrischer Kapazität sorgt für exzellentes dynamisches Verhalten bei reduziertem Antriebsleistungsbedarf.
PICMA® Multilayer-Piezoaktoren
PICMA®-Aktoren nutzen den indirekten piezoelektrischen Effekt und erreichen bei relativ niedrigen Spannungen hohe Kräfte. Sie brauchen nur einen sehr geringen Bauraum. Gleichzeitig sind die PICMA® Aktoren sehr dynamisch und können eine Position nahezu unendlich genau erreichen. Deshalb finden sie in der Dosiertechnik Anwendung, beispielsweise als Mikropumpe. Aufgrund ihrer keramischen Isolierung weisen PICMA®-Aktoren eine hohe Zuverlässigkeit und Klimafestigkeit auf. PI rüstet PICMA®-Aktoren für Kundenanwendungen auch mit individuellen Anschlüssen aus.
PICMAWalk
PICMAWalk Antriebe erreichen Vorschubkräfte bis 50 N und Haltekräfte bis 60 N. Die maximale Geschwindigkeit beträgt 15 mm/s. PICMAWalk verwenden die bewährten PICMA® Multilayer-Piezoaktoren. Das bedeutet niedrige Ansteuerspannungen bis 120 V. PICMA® Piezoaktoren sorgen auch für die lange Lebensdauer und außergewöhnliche Zuverlässigkeit der PICMAWalk Technologie.
Piezoelektrischer Trägheitsantrieb
Piezoträgheitsantriebe sind platzsparende und preiswerte piezobasierte Antriebe mit relativ hohen Haltekräften und theoretisch unbegrenztem Stellweg. Mit einer Betriebsfrequenz von max. 20 kHz erreichen direkt auf den Läufer wirkende Antriebe Geschwindigkeiten von mehr als 5 mm/s. Der Q-Motion-Antrieb arbeitet bei der maximalen Betriebsfrequenz von 20 kHz geräuschlos. Im Stillstand ist der Antrieb selbsthemmend, muss nicht bestromt werden und erwärmt sich nicht. Er hält die Position mit maximaler Kraft. Er geeignet sich damit für batteriebetriebene, mobile Anwendungen mit geringen Lastzyklenzahlen.
PiezoMove®
PiezoMove® Aktoren kombinieren geführte Bewegung und lange Stellwege bis 1 mm sowie optional einen Sensor, der Genauigkeiten im Bereich bis 10 Nanometern zulässt. Die hochpräzisen, reibungsfreien Festkörpergelenkführungen erreichen eine sehr hohe Steifigkeit sowie eine extrem geringe seitliche Auslenkung.
Damit sind sie leichter handhabbar als ein einfacher Piezoaktor, aber dennoch besonders kompakt. Die Zahl und Größe der eingesetzten Piezoaktoren beeinflussen die Steifigkeit und Krafterzeugung. Aufgrund dieser Eigenschaften, ihren kompakten Abmessungen und des kostengünstigen Designs eignen sich die PiezoMove® Hebelaktoren speziell für OEM-Anwendungen.
Piezoresistiver Sensor (PRS)
Dehnmessstreifensensor, der aus einer Halbleiterfolie besteht.
Siehe >> Dehnmessstreifen.
PiezoWalk® Schreitantrieb
PiezoWalk® Antriebe nutzen das Piezo-Schreitprinzip und kombinieren eine Subnanometer-Auflösung mit hohen Kräften, einem robusten Design und einem skalierbaren Stellweg. Industriekunden setzen Schreitantriebe ein, um Stellwege größer 1 mm zu fahren und bei nanometergenauer Auflösung stabil die Position zu halten. PI bietet Schreitantriebe mit großen Vorschubkräften, Stell- und Haltekräften, aber auch relativ hohen Geschwindigkeiten an, die auch im Vakuum eine hohe Lebensdauer aufweisen.
Siehe >> NEXLINE®, >> NEXACT® und >> PICMAWalk.
PIglide Luftlagertechnologie
Die PIglide Luftlager-Technologie ermöglicht eine reibungsfreie Positionierung mit hoher Führungsgenauigkeit von bis zu 5 µrad über 100 mm. Diese Technologie verbessert die Positionsauflösung und ermöglicht Scannen mit konstanter Geschwindigkeit. Die Wiederholgenauigkeit beträgt nur wenige Encoderimpulse. Eine ähnliche Präzision im Nanometerbereich ist auch mit festkörpergeführten Piezo-Nanopositionierern möglich, jedoch über deutlich kleinere Stellwege.
PILine® Ultraschall-Piezomotoren
PILine® Ultraschall-Piezomotoren sind präzise, dynamisch, klein und leise und darüber hinaus selbsthemmend. Dadurch reduziert sich der Energiebedarf der Anwendung, denn die Motoren müssen in Ruhe nicht dauerhaft mit Strom versorgt werden. Deshalb und aufgrund der kleinen Baugröße sind die Antriebe besonders in mobilen Geräten in der optischen Industrie und bei der Messtechnik gefragt, wo sie klassische Antriebstechnologien ersetzen können.
PIMag Magnetische Linearmotoren
Magnetische Direktantriebe von Physik Instrumente (PI) schaffen eine direkte und steife Verbindung zwischen der bewegten Last und dem Antrieb. Sie sind in der Industrie dann gefragt, wenn hochdynamisch und hochgenau Gegenstände positioniert werden sollen. Durch die leichtgängigen Präzisions-Linearführungen mit Kreuzrollenlagern eignen sich solche Linearmotortische sehr gut für Scanning-Anwendungen mit konstanter Geschwindigkeit. Die Antriebe arbeiten berührungslos und sind damit sehr zuverlässig. Über standardisierte Feldbus-Systeme können Anwender die magnetischen Direktantriebe sehr schnell in bestehende Maschinen und Anlagen integrieren.
Siehe >> Linearmotor, >> Torquemotor.
PIMag Voice-Coil
Voice-Coil-Antriebe sind klein und eignen sich durch ihr geringes Gewicht und das reibungsfreie Antriebsprinzip sehr gut für Anwendungen, die hohe Dynamik und hohe Geschwindigkeiten bei begrenzten Stellwegen erfordern – beispielsweise in der Medizintechnik. Die Voice-Coil-Antriebe bieten dem Anwender vor allem hinsichtlich Verschleiß und Dynamik Vorteile gegenüber klassischen spindelbasierten Lösungen. Hohe Scanfrequenzen und präzise Positionierung sind mit diesen Antrieben möglich, da sie frei von Hystereseeffekten sind.
Siehe >> Voice-Coil-Antrieb.
PIMikroMove®
Anwendersoftware mit grafischer Benutzeroberfläche (GUI) zur Steuerung von PI Positioniersystemen, unabhängig von ihrem Antriebsprinzip.
PIRest
Piezoaktor-Technologie für die aktive Justage von dauerstabilen subnanometergenauen Abständen von mehreren Mikrometern. Der PIRest-Aktor wird nur während des aktuellen Positioniervorganges mit Spannung versorgt und hält seine Position ohne Spannung.
Planetengetriebe
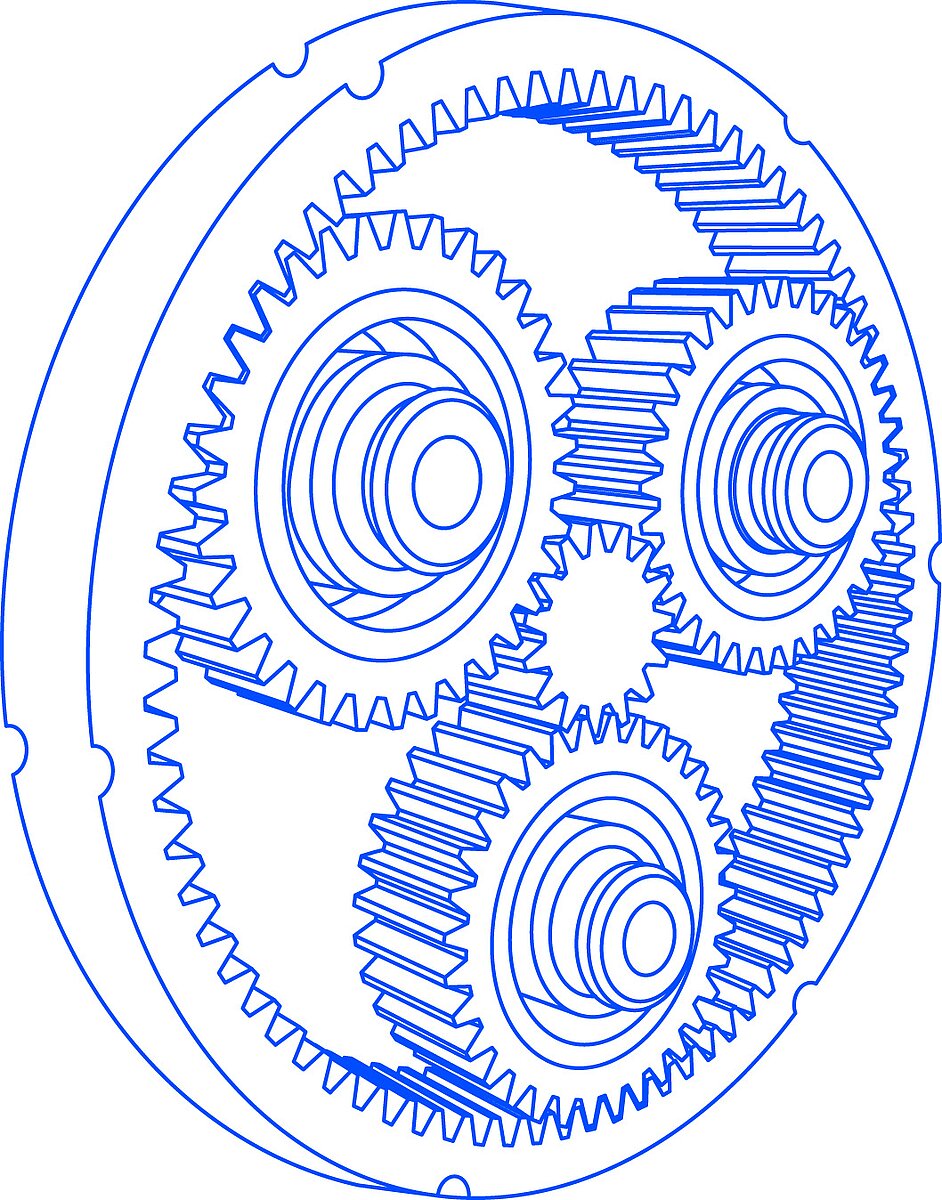
Planetengetriebe bestehen aus einem zentralen Sonnenrad, das mit einer Welle verbunden ist, und weiteren Planetenrädern, die innerhalb eines Hohlrads liegen. Sie eignen sich für die Übertragung höchster Drehmomente, da die auftretende Last auf mehrere Zahnräder verteilt wird. Somit lassen sich hohe Übersetzungsverhältnisse auf sehr kompakten Bauraum realisieren. Oft sind die Zahnräder der Eingangsstufe in Kunststoff ausgeführt, um Geräusche bei höheren Drehzahlen zu reduzieren. Für Vakuumanwendungen, hohe Temperaturen oder besonders hohe Drehmomente sollte auf eine Eingangsstufe aus Stahl zurückgegriffen werden. Neben Stirnradgetrieben werden in Lineartischen von PI meist Planetengetriebe für die Getriebemotoren eingesetzt.
Profilgenerator
Funktionalität eines Motorcontrollers, die Bewegungsprofile wie lineare Interpolation, Punkt-zu-Punkt, Trapeze und Doppelkurven ermöglicht. Für mehrere Achsen spricht man von einer elektronischen Getriebefunktion.
Pulsweitenmodulation (PWM)
Mit PWM angesteuerte Motoren erlauben die Steuerung der (Motor-)Leistung mit einem hochfrequenten Signal. Dadurch kann das Leistungssignal vom digitalen Steuersignal getrennt werden.
PWM-Steuerungen werden z.B. bei geschalteten Hochleistungsverstärkern für Piezoaktoren oder zur Steuerung von Elektromotoren wie Linearmotoren oder Voice-Coil Antrieben eingesetzt. Eine Besonderheit von PI ist der >> ActiveDrive Motor, siehe dort.
Rauschen
Für kapazitive Sensoren. In erweiterten Messbereichen ist das Rauschen deutlich höher als im nominalen Messbereich.
Rechnerische Auflösung
Die theoretisch kleinste Bewegung, die ein Positioniersystem durchführen kann, wird rechnerische Auflösung genannt. Dieser Wert darf nicht mit der kleinsten Schrittweite verwechselt werden. Bei indirektem Positionsmessverfahren gehen in die Berechnung der Auflösung z. B. die Werte für die Spindelsteigung, Getriebeuntersetzung, Auflösung des Motors bzw. Sensors / Encoders etc. ein, sie liegt oft wesentlich unter der kleinsten Schrittweite der Mechanik. Bei direkten Messverfahren wird die Auflösung des Sensorsystems angegeben.
Referenzschalter
In Verbindung mit inkrementellen Positionsencodern wird ein Referenzpunkt benötigt um die absolute Position zu ermitteln. Funktionsweise: optisch, magnetisch.
Resonanzfrequenz
Lastfrei: Erste Resonanzfrequenz in Stellrichtung.
Mit Last: Resonanzfrequenz des belasteten Systems.
Die Resonanzfrequenz gibt nicht die maximale Betriebsfrequenz an. PI empfiehlt eine Betriebsfrequenz im ungeregelten Betrieb von max. einem Drittel der Resonanzfrequenz. Kundenspezifische Systeme können davon abweichen. Für weitere Informationen wenden Sie sich bitte an PI.
Riemengetriebe
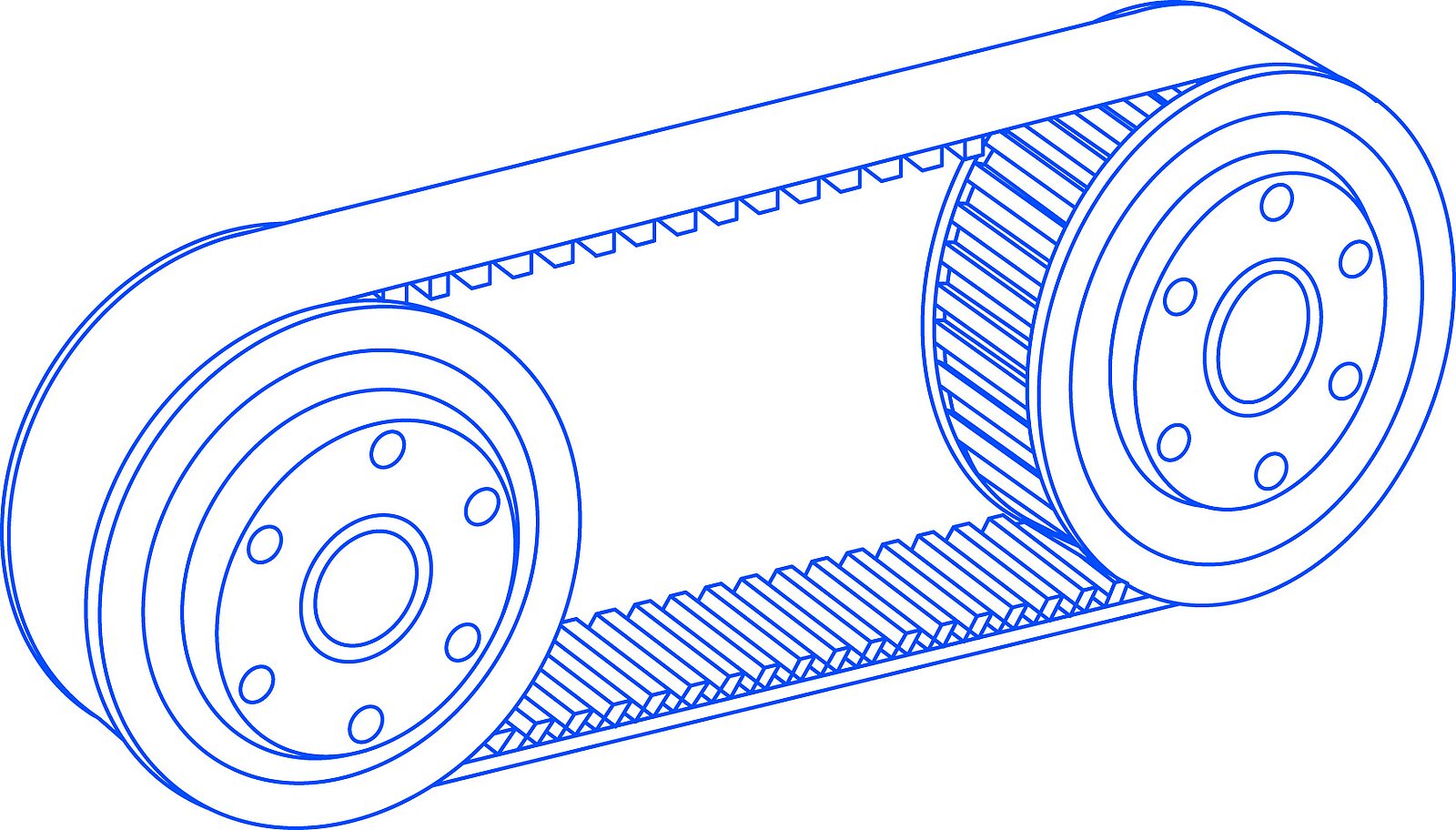
Riemengetriebe bestehen aus zwei Zahnrädern, die über einen Riemen miteinander verbunden sind. Dadurch lassen sich größere Wellenabstände überbrücken und hohe Umfanggeschwindigkeiten realisieren. Wartungsaufwand fällt hauptsächlich durch einen Riemenwechsel oder –nachspannen an. Der Riemen begrenzt den Temperaturbereich. Aufgrund auftretender Zug- und Druckkräfte kommt es typischerweise zu einer größeren Wellenbelastung. Riemengetriebe finden sich bei PI oft in besonders kompakten Positioniertischen, z.B. Hub- oder Lineartischen, bei denen der Antrieb seitlich „gefaltet“ angeordnet ist. Riemengetriebe sind Anwendungen im Vakuum bis zu 10-6 hPa geeignet.
Rollengewindespindel
Bei Rollengewindespindeln ist die Kontaktfläche zwischen Spindel, Rollen und Mutter deutlich größer als bei Kugelgewindespindeln. Dies ergibt eine sehr hohe Steifigkeit und erlaubt höhere Belastungen. Es gibt verschiedene Ausführungen, beispielsweise geführte Planetenrollen ohne Rollenrückführung oder Umlaufrollen, d.h. mit Rollenrückführung, wodurch noch kleinere Steigungen ermöglicht werden.
Rotationsencoder
Rotationsencoder messen die Position indirekt, da sie z.B. an der Motorwelle befestigt werden. Sie sind also an einer sich drehenden Stelle des Antriebsstrangs angebracht. Der Vorteil liegt in der einfachen Anbringung des Sensors, jedoch beeinflussen Umkehrspiel und mechanisches Spiel das Messergebnis.
S
Scan-Routine
Schleppkettentaugliches Kabel
Schneckengetriebe
Schrittmotor, 2-Phasen Schrittmotor (2SM)
Sensorauflösung
Sensorbandbreite
Sensor-Linearisierung
Serielle Kinematik
Serielle Metrologie
Servomotor
Sinnvolle Piezolast
Software
SpaceFAB Design
Spezifikationen
Spitzenstrom
Steifigkeit
Stirnradgetriebe
Stromaufnahme
Strombegrenzung
Synchron-Servomotor (SSVM)
Scan-Routine
Algorithmus, der eine Bewegungssequenz ausführt und mit dem die zugehörigen Daten ausgewertet werden können; z.B. Suche nach einem optimierten analogen Eingangssignal.
Beispiele sind >> Flächenscan und >> Gradientensuche.
Schleppkettentaugliches Kabel
Schleppkettentaugliche Kabel finden in Energieführungsketten Anwendung. Sie bleiben funktionsfähig, obwohl sie während ihrer Lebensdauer einer großen Anzahl von Biegezyklen ausgesetzt sind.
Schneckengetriebe
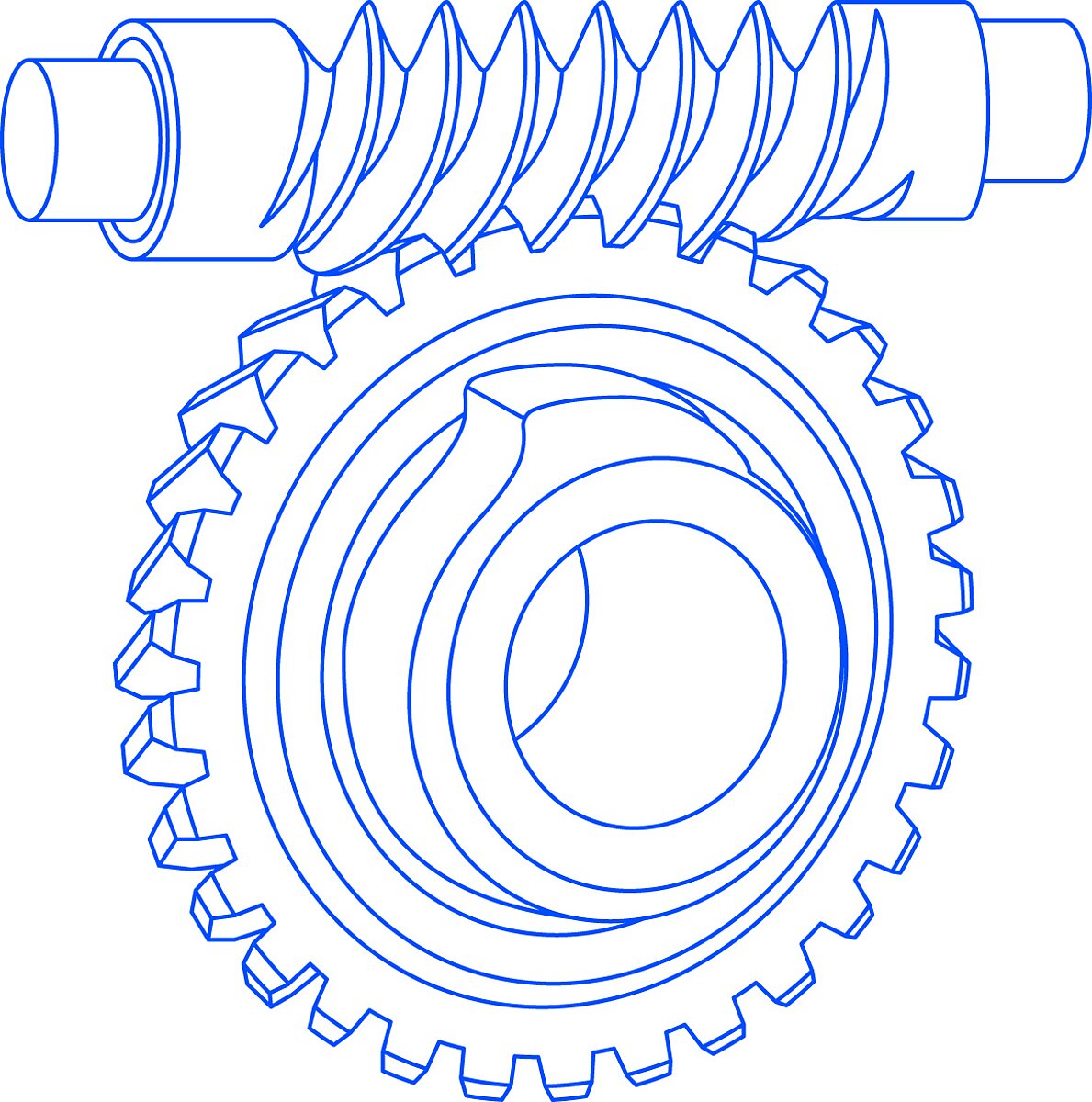
Schneckengetriebe bestehen aus einer Welle mit Schneckengängen und einem Schneckenrad. Die Kraft wird im rechten Winkel mit Gleitreibung übertragen. Deshalb hat die Schneckenwelle eine hohe Selbsthemmung, sodass für bestimmte Anwendungen keine zusätzliche Bremse erforderlich ist. Die Gleitreibung verursacht aber einen niedrigen Wirkungsgrad, hohen Verschleiß und unter Umständen eine hohe Temperatur. Typischerweise kann mit Schneckengetrieben bereits mit einer Stufe eine hohe Übersetzung erreicht werden, was sie vergleichsweise günstig macht. PI setzt oft Schneckengetriebe für Rotationstische, weil diese Bewegungen im rechten Winkel übertragen. So kann der Motor seitlich am Rotationstisch ausgerichtet werden.
Schrittmotor, 2-Phasen Schrittmotor (2SM)
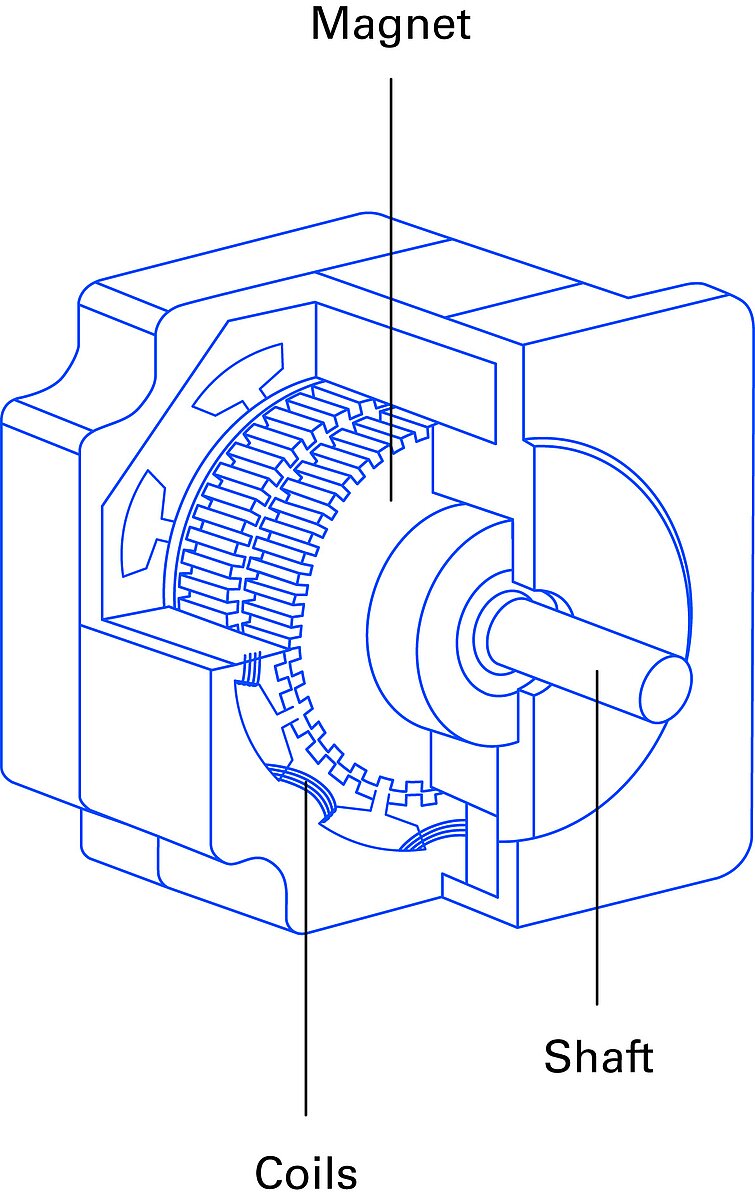
Schrittmotoren nehmen nur diskrete Positionen innerhalb einer Umdrehung ein. Aufgrund der quantisierten Schritte bieten Schrittmotoren eine geringere Dynamik als DC-Motoren. Hohe Drehzahlen lassen sich nur über eine hohe Schrittzahl auf Kosten des Drehmoments realisieren, da für die Einstellung der Zwischenschritte Wicklungen teilweise gegeneinander bestromt werden müssen.
Schrittmotoren können vakuumtauglich realisiert werden, besitzen eine hohe Lebensdauer und können auch ohne Encoder zur Positionierung eingesetzt werden. Durch einen Betrieb im offenen Regelkreis entsteht außerdem kein Positionsjitter durch die sonst vorliegende Regelung. Zur Erhöhung der Laufruhe bzw. zur Resonanzunterdrückung wird oft ein mechanischer Dämpfer eingesetzt, der als Handrad verwendet werden kann.
Schrittmotoren gibt es in unterschiedlichsten Bauformen.
Sensorauflösung
Kleinstes Inkrement, das rechnerisch vom verwendeten Messsystem detektiert werden kann. Rotationsencoder: Anzahl der Impulse pro Spindeldrehung. Linearencoder: Kleinstes Inkrement, das vom verwendeten Sensorsystem noch detektiert wird. Der Sensor kann für die Positionsauflösung ein kritisches Element sein, deshalb wird erforderlichenfalls die Sensorauflösung separat spezifiziert.
Siehe >> Rechnerische Auflösung.
Sensor-Linearisierung
Bei kapazitiven Sensoren zeichnet sich die Signalaufbereitung durch einen besonders niedrigen Rauschpegel aus. Das integrierte Linearisierungssystem (ILS) kompensiert die Einflüsse von Parallelitätsfehlern zwischen den Kondensatorplatten.
Serielle Kinematik
Gestapelter oder geschachtelter Aufbau eines Mehrachsen-Bewegungssytems. Jeder Aktor wirkt auf seine eigene Plattform. Aktor und Bewegungsachse sind einander eindeutig zugeordnet. Die Montage und die Ansteuerung mehrerer Achsen sind dadurch relativ einfach. Die dynamischen Eigenschaften hängen von der jeweiligen Achse ab. Eventuelle Führungsfehler summieren sich und die Gesamtführungsgenauigkeit ist schlechter als bei der >> Parallelkinematik, siehe dort.
Serielle Metrologie
Jeder servo-geregelten Bewegungsachse ist ein Positionssensor zugeordnet. Unerwünschtes Übersprechen (Crosstalk), oder Führungsfehler bleiben unbemerkt und unkorrigiert.
Siehe >> Parallelmetrologie.
Servomotor
Ein Motor mit Positionserfassung und –regelung wird als Servomotor bezeichnet. Beim Motor selbst handelt es sich oft um einen DC-Motor. Servomotoren bieten hohe Drehmomente bei geringer Drehzahl, eine gute Dynamik über einen großen Drehzahlbereich, schnelles Ansprechen, geringe Wärmeentwicklung sowie einen gleichmäßigen und schwingungsfreien Betrieb. Zur Positionserfassung werden beispielsweise Rotationsencoder oder Absolutencoder eingesetzt. Die Verstärkung des Positionssignals sowie die Regelung der Motorparameter werden von einem Servoverstärker übernommen. Dieser wird üblicherweise als PID-Regler (proportional, integral, derivativ) mit zusätzlichen Filtern ausgelegt, um die oben genannten Charakteristika bestmöglich auszunutzen.
Siehe: >> Bürstenloser DC-Motor, >> DC-Motor (DC).
Sinnvolle Piezolast
Für geschaltete Verstärker. Die mögliche Ausgangsleistung eines Piezocontrollers / Treibers hängt von den internen und externen kapazitiven Lasten ab.
SpaceFAB Design
SpaceFAB sind teils parallelkinematische Aufbauten, deren Beinlänge konstant ist und die eine besonders niedrige Bauhöhe ermöglichen. Im SpaceFAB treibt je eine XY-Anordnung von Linearverstellern drei Einzelbeine an. Das mechanische Layout ermöglicht einen asymmetrischen Aufbau, z.B. längere Stellwege in einer gewählten Bewegungsrichtung.
Spezifikationen
Vor Auslieferung werden die Leistungsspezifikationen geprüft. Manche Spezifikationen sind nicht in Kombination verfügbar. Die Leistungsspezifikationen gelten bei Raumtemperatur (22 ±3 °C) und Systeme im geregelten Betrieb werden bei dieser Temperatur kalibriert (Spezifikationen für abweichende Betriebstemperaturen auf Anfrage). Bei Betrieb bei deutlich niedrigerer oder höherer Temperatur ist eventuell eine Neueinstellung der Betriebsparameter nötig. Sonderanfertigungen für ultra-niedrige oder ultra-hohe Temperaturen auf Anfrage.
Spitzenstrom
Steht nur für sehr kurze Zeiten zur Verfügung, bei Piezoverstärkern / Controllern typischerweise unter einigen Millisekunden. Dient der Abschätzung der möglichen Dynamik mit einer bestimmten kapazitiven Last. Hinweis: In diesem Fall arbeitet der Piezocontroller / Verstärker nicht mehr unbedingt linear.
Steifigkeit
Federkonstante, nichtlinear für piezoelektrische Materialien. In Datenblättern ist die statische Großsignalsteifigkeit des Positionierers bei Raumtemperatur in Stellrichtung angegeben. Kleinsignalsteifigkeit und dynamische Steifigkeit können abweichen, z.B. bedingt durch die aktive Natur des piezoelektrischen Materials oder Verbundeffekte.
Stirnradgetriebe
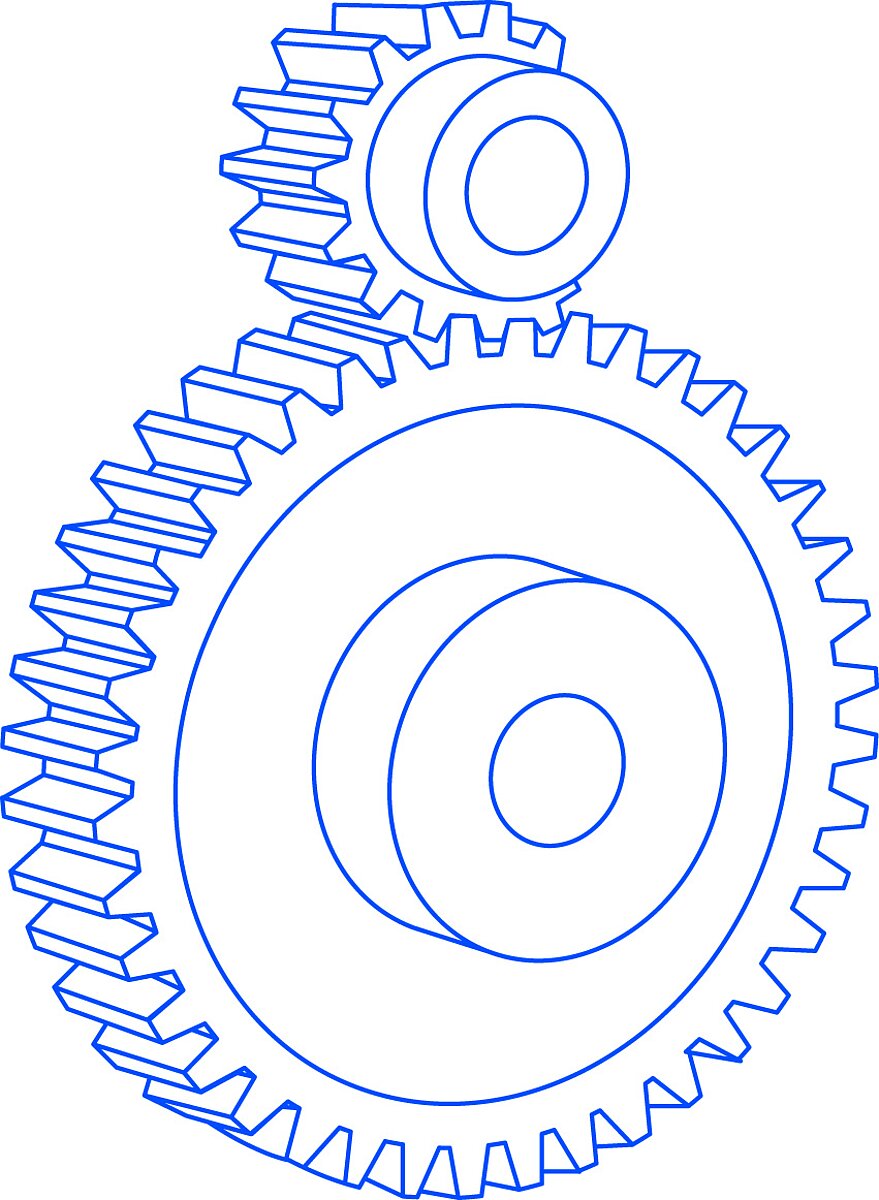
Stirnradgetriebe sind aus zwei parallel zueinander liegenden, unterschiedlich großen Zahnrädern aufgebaut. Aufgrund des einfachen Aufbaus lassen sich Stirnradgetriebe besonders einfach und robust herstellen. Ganzmetall-Ausführungen erfüllen hohe Anforderungen an einen gleichmäßigen und ruhigen Lauf. Für hohe Präzision bei geringem Drehmoment können besonders spielarme Ausführungen realisiert werden. Dazu wird durch gegensinniges Verdrehen der Getriebestränge und deren Verspannung auf dem Motorritzel die Vorspannung entsprechend eingestellt. Neben Planetengetrieben werden in Lineartischen von PI meist Stirnradgetriebe für die Getriebemotoren eingesetzt.
Stromaufnahme
Stromverbrauch des Systems auf der Versorgungsseite. Angegeben im Leerlauf (Controller ohne Last). Alternativ Leistungsaufnahme.
Synchron-Servomotor (SSVM)
Ein Servomotor, der als Synchronmaschine ausgelegt ist. Ein solcher Motor kann beispielsweise aus einem bürstenlosen DC-Servomotor mit Sinuskommutierung realisiert werden.
Siehe >> bürstenloser DC-Motor und >> Servomotor.
Torquemotor
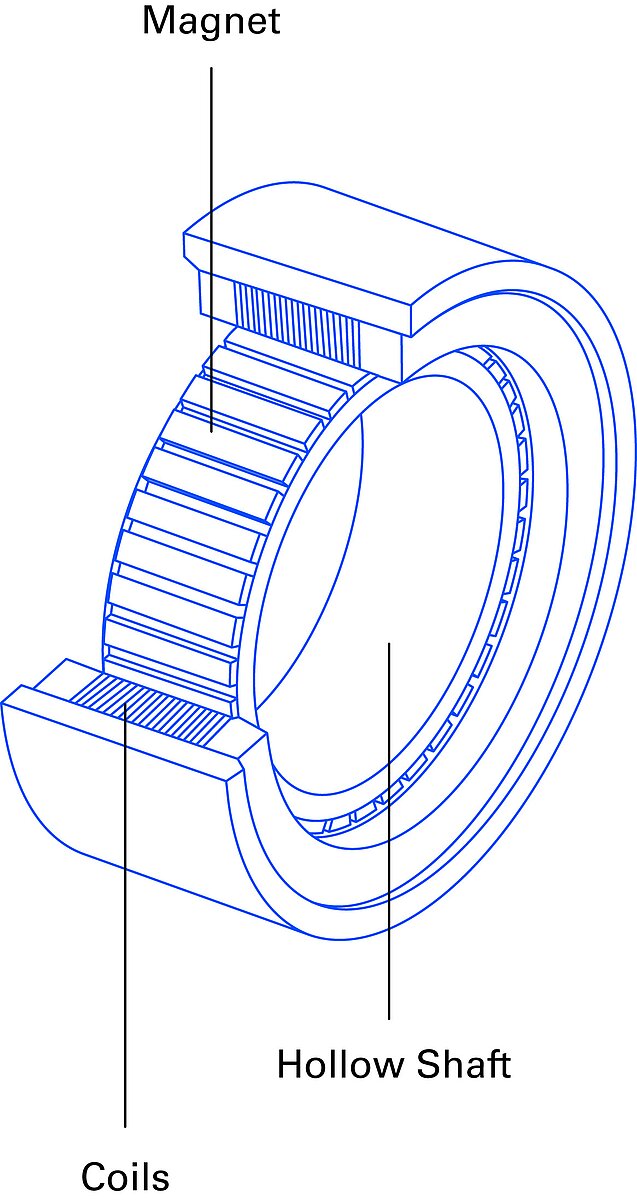
Torquemotoren sind spielfreie Antriebe mit oftmals großen radialen Abmessungen. Sie können sehr flach gebaut werden. Die großen radialen Abmessungen ermöglichen Hohlwellen bzw. große Aperturen, z.B. zum Durchführen von Laserstrahlen und Kabeln. Die Spielfreiheit ermöglicht eine hohe Positioniergenauigkeit und eine hohe Antriebssteifigkeit, die zu einer hohen Wiederholgenauigkeit führt. Das große Antriebsmoment lässt große Beschleunigungen zu und führt somit zu einer hohen Dynamik. Weitere Eigenschaften sind hohe Drehsteifigkeit, hohe Spitzenmomente, hoher Wirkungsgrad und hohe Laufruhe.
Aufgrund der kompakten Bauweise in Bezug auf das Drehmoment bzw. der vorliegenden Rotationssymmetrie eignet sich der Torquemotor unter anderem für Hochlastanwendungen auf Mehrachs- oder Rundtischen.
Trajektorien-Generator
Ein Profilgenerator für Mehrachssysteme mit bekannter Kinematik und Interpolation. Hexapod-Controller unterstützen lineare Interpolation, Punkt-zu-Punkt, Trapeze und S-Kurven.
Siehe >> Profilgenerator.
Übersprechen (Crosstalk)
Abweichung von der idealen Bewegung auf den Achsen senkrecht zur Bewegungsrichtung.
Winkelfehler sind xrx = θX = Rollen, xry = θY = Neigen, xrz = θZ = Gieren.
Lineare Fehler sind Abweichungen im Planlauf wie xty = Geradheit, xtz = Ebenheit.
Siehe >> Linearitätsabweichung.

Übertemperaturschutz
Abschalttemperatur für den Spannungsausgang. Kein automatisches Wiedereinschalten.
Umfangreiches Softwarepaket
Jeder Controller von PI wird mit einem umfangreichen Software-Paket ausgeliefert. Die zur Verfügung gestellten Anwenderprogramme unterstützen den Anwender bei der Inbetriebnahme und Parametrisierung des Gesamtsystems. Mit der PIMikroMove®-Anwendersoftware können alle angeschlossenen Controller in einer grafischen Schnittstelle angezeigt und kommandiert werden. Es stehen für alle gängigen Programmiersprachen, darunter NI LabVIEW und MATLAB, Programmierschnittstellen zur Verfügung um PI Controller in vorhandene Anwenderprogramme einzubinden. Mit speziellen Software-Werkzeugen für Hexapoden können Bewegungsbereiche simuliert und zulässige Kräfte ermittelt werden.
Umkehrspiel
Positionsfehler, der bei der Umkehrung der Antriebsrichtung auftritt. Umkehrspiel wird durch das mechanische Spiel zwischen den Komponenten des Antriebsstrangs; wie Getriebe oder Lager, oder durch die Reibung im Führungssystem verursacht. Das Umkehrspiel hängt auch von der Temperatur, der Beschleunigung, der Last, der Position der Gewindespindel, der Richtung, dem Verschleiß, usw. ab. Durch Vorspannen des Antriebsstrangs kann das Umkehrspiel verringert werden. Ein Positionsmessverfahren, mit der die Position der Plattform direkt ermittelt wird, eliminiert alle Fehler im Antriebsstrang (Direktmetrologie).
Ungeregelter Betrieb
Ein Aktor oder Motor wird ohne Positionssensor verwendet. Der ungeregelte Betrieb ist ideal für Anwendungen, bei denen schnelle Ansprechzeiten und sehr hohe Auflösungen bei maximaler Bandbreite erforderlich sind. Hier ist die Kommandierung und das Auslesen der Zielposition in absoluten Werten entweder unwichtig oder wird von externen Positionssensoren durchgeführt.
Die Auslenkung von Piezoaktoren entspricht in etwa der Antriebsspannung; Kriechen, Nichtlinearität und Hysterese bleiben ohne Regelung unkompensiert.
Ein ungeregelter Betrieb ist bei elektromagnetischen Direktantrieben, wie z.B. Linearmotoren und Voice-Coil-Antrieben, nicht möglich.
Vakuumausführungen
Die Produktion im Vakuum gewinnt in vielen Industriezweigen an Bedeutung. Physik Instrumente bietet seinen Kunden deshalb verschiedene Antriebstechnologien an, die im Vakuumbereich von 10–7 oder auch bis 10–10 hPa betrieben werden können. Dazu zählen Piezoaktoren, die auch unter starken Magnetfeldern und in kryogener Umgebung arbeiten, Piezosysteme mit Stellwegen unter 1,5 mm und Subnanometer-Präzision, Piezomotoren unterschiedlichster Auslegung hinsichtlich Kraft, Dynamik und Stellweg und klassische Motorisierungen mit speziell ausgelegten DC- oder Schrittmotoren, die längere Stellwege ermöglichen.
Verstärkerauflösung
Nur für digital angesteuerte Verstärker: Messung des kleinsten digitalen Ausgabewerts (LSB) in mV.
Verstärkerprinzip
PI verwendet folgende Verstärkerprinzipien: ladungsgesteuert, geschaltet (class D), linear (class AB).
Voice-Coil-Antriebe
Diese reibungsfreien magnetischen Linearantriebe werden durch hohe Dynamik, aber relativ geringe Haltekräfte charakterisiert.
Voice-Coil Motoren sind Direktantriebe. Das Antriebsprinzip ist die technische Umsetzung der Lorentz-Kraft: Die Kraft, die ein stromdurchflossener Leiter im Permanentmagnetfeld ausübt, ist proportional zur Magnetfeldstärke und zum Strom. Der Motion Controller regelt die Kraft über eine PWM-Regelung. Für präzise Positionierung wird der Antrieb mit einem Messsystem kombiniert und geregelt betrieben. Die Stellwege von Voice-Coil Antrieben sind durch die Technologie begrenzt und liegen typischerweise zwischen 0,5 mm und 25 mm.
Typische Anwendungen sind kurzhubige Bewegungen mit schnellen Einschwingzeiten, Anwendungen mit geringer Geräuschentwicklung oder sensible programmierbare Kraftregelungen.
Vorgespannter Piezoaktor
Piezoelektrische Stapelaktoren werden durch eine interne Vorspannung geschützt. Die Vorspannung sorgt für sicheren Betrieb in beliebigen Anwendungsszenarien und ist ideal für dynamische Anwendungen und Zugbelastungen. Vorgespannte Piezoaktoren sind für die Integration in das System des Kunden bestimmt und haben keine Führung. Wenn ein Übersprechen der Bewegung einzelner Achsen nicht tolerierbar ist, wird eine externe Führung benötigt.
Welligkeit, Rauschen, 0 bis 100 kHz
Restwelligkeit der Spannung in mVpp mit eindeutiger Frequenz. Rauschen über gesamten Frequenzbereich.