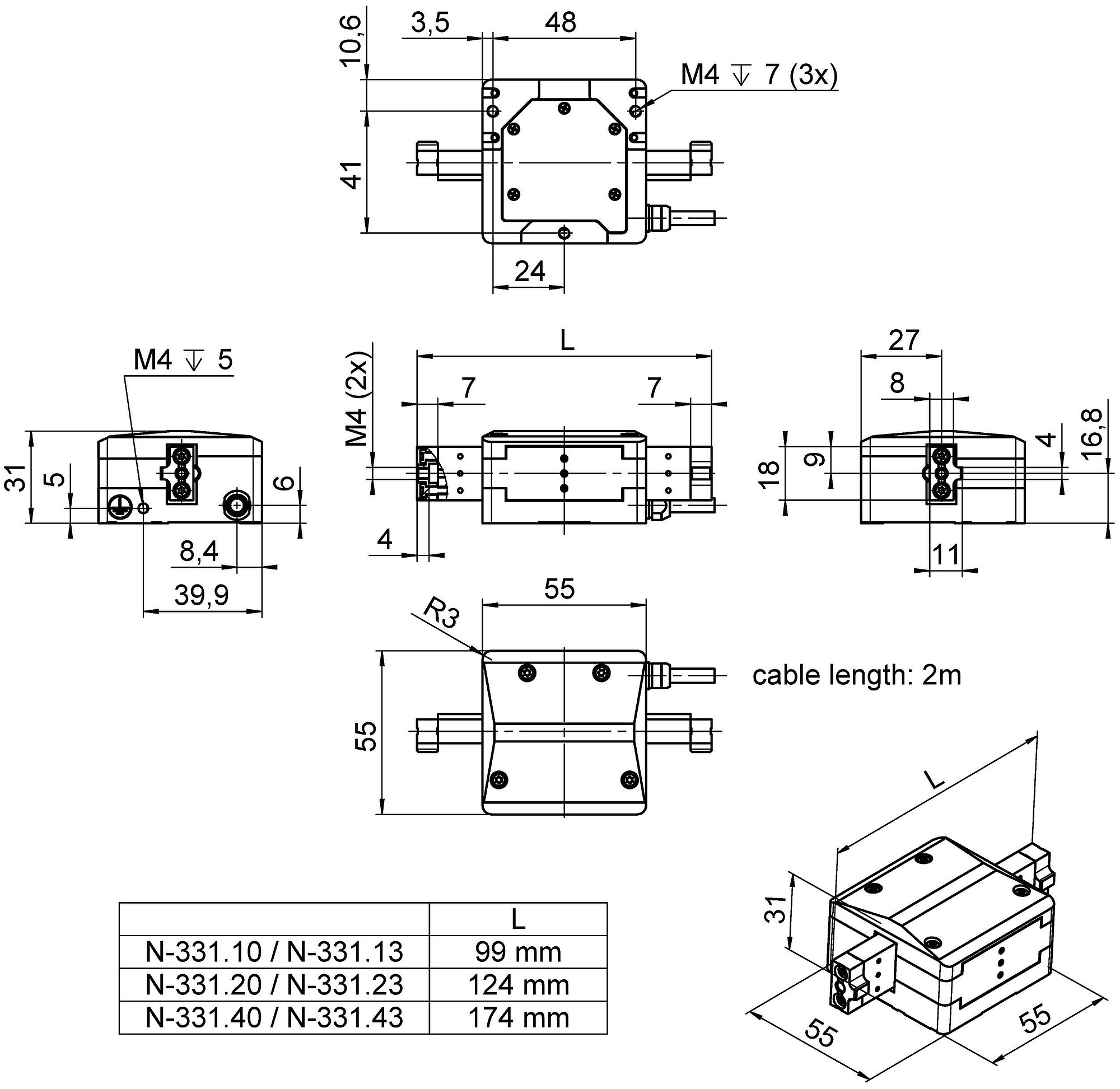
N-331.10
PICMAWalk Schreitantrieb; 30 mm Stellweg (ungeregelt); 50 N Antriebskraft; 12 mm/s maximale Geschwindigkeit; 2 m Kabellänge




Einsatzgebiete
Überragende Lebensdauer dank PICMA® Piezoaktoren
Die PICMA® Piezoaktoren sind vollkeramisch isoliert. Dies schützt sie vor Luftfeuchtigkeit und Ausfällen durch erhöhten Leckstrom. PICMA® Aktoren bieten eine bis zu zehnmal höhere Lebensdauer als konventionelle polymerisolierte Aktoren. 100 Milliarden Zyklen ohne einen einzigen Ausfall sind erwiesen.
Nanometer-Präzision und hohe Vorschubkraft mit PiezoWalk® Schreitantrieben
Im PiezoWalk® Schreitantrieb führen mehrere Piezoaktoren eine Schreitbewegung aus, die zum Vorschub eines Läufers führt. Die Ansteuerung der Aktoren ermöglicht kleinste Schritt- und Vorschubbewegungen bei einer Auflösung von weit unter einem Nanometer.
Hochgenaue Positionsmessung mit inkrementellem Linearencoder
Kontaktlose optische Linearencoder messen die Position mit höchster Genauigkeit direkt an der Plattform. Nichtlinearitäten, mechanisches Spiel oder elastische Deformation beeinflussen die Messung nicht.
| Bewegen | N-331.10 | N-331.13 | N-331.20 | N-331.23 | N-331.40 | N-331.43 | Toleranz |
|---|---|---|---|---|---|---|---|
| Aktive Achsen | X | X | X | X | X | X | |
| Stellweg in X | — | 25 mm | — | 50 mm | — | 100 mm | |
| Stellweg in X, ungeregelt | 30 mm | 30 mm | 55 mm | 55 mm | 105 mm | 105 mm | ±0,5 mm |
| Stellweg in X (Analogbetrieb) | 20 µm | 20 µm | 20 µm | 20 µm | 20 µm | 20 µm | typ. |
| Betriebsfrequenz im Vollschrittbetrieb | 0,6 kHz | 0,6 kHz | 0,6 kHz | 0,6 kHz | 0,6 kHz | 0,6 kHz | |
| Geschwindigkeit (100 % Ansteuerung, Vollschrittbetrieb) | 12 mm/s | 12 mm/s | 12 mm/s | 12 mm/s | 12 mm/s | 12 mm/s | max. |
| Geschwindigkeit (100 % Ansteuerung, Nanoschrittbetrieb) | 10 mm/s | 10 mm/s | 10 mm/s | 10 mm/s | 10 mm/s | 10 mm/s | max. |
| Positionieren | N-331.10 | N-331.13 | N-331.20 | N-331.23 | N-331.40 | N-331.43 | Toleranz |
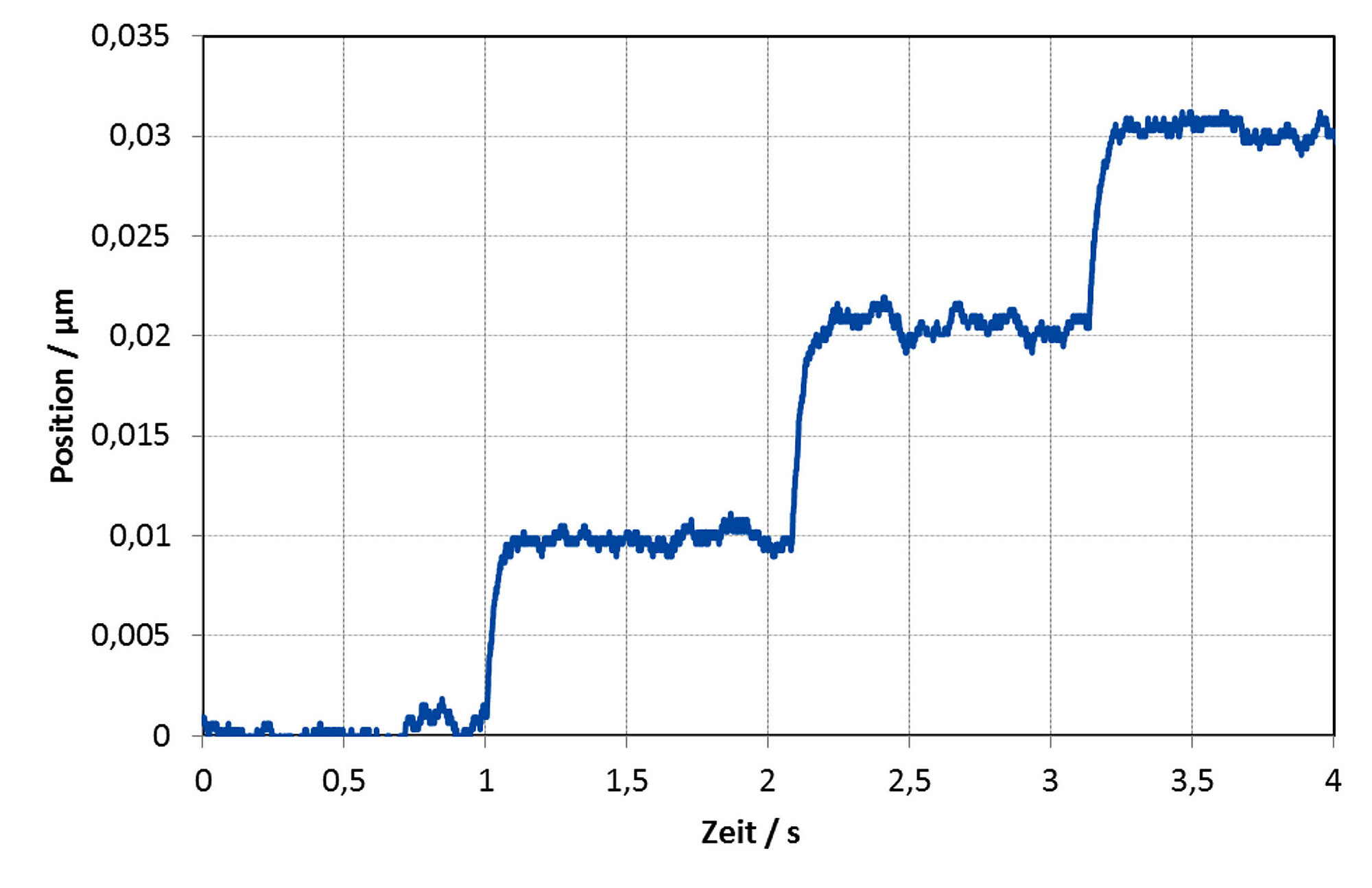
| Kleinste Schrittweite in X | 0,01 µm | 0,01 µm | 0,01 µm | 0,01 µm | 0,01 µm | 0,01 µm | typ. |
| Auflösung in X, ungeregelt | 0,02 nm | 0,02 nm | 0,02 nm | 0,02 nm | 0,02 nm | 0,02 nm | typ. |
| Integrierter Sensor | — | Inkrementeller Linearencoder | — | Inkrementeller Linearencoder | — | Inkrementeller Linearencoder | |
| Systemauflösung in X | — | 10 nm | — | 10 nm | — | 10 nm | |
| Antriebseigenschaften | N-331.10 | N-331.13 | N-331.20 | N-331.23 | N-331.40 | N-331.43 | Toleranz |
| Antriebstyp | PICMAWalk | PICMAWalk | PICMAWalk | PICMAWalk | PICMAWalk | PICMAWalk | |
| Betriebsspannung | -20 bis 120 V | -20 bis 120 V | -20 bis 120 V | -20 bis 120 V | -20 bis 120 V | -20 bis 120 V | |
| Antriebskraft in positiver Bewegungsrichtung in X | 50 N | 50 N | 50 N | 50 N | 50 N | 50 N | min. |
| Antriebskraft in negativer Bewegungsrichtung in X | 50 N | 50 N | 50 N | 50 N | 50 N | 50 N | min. |
| Mechanische Eigenschaften | N-331.10 | N-331.13 | N-331.20 | N-331.23 | N-331.40 | N-331.43 | Toleranz |
| Haltekraft in X, passiv | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | min. |
| Bewegte Masse in X, unbelastet | 110 g | 110 g | 140 g | 140 g | 190 g | 190 g | |
| Gesamtmasse | 580 g | 580 g | 610 g | 610 g | 660 g | 660 g | |
| Material | Aluminium, Edelstahl | Aluminium, Edelstahl | Aluminium, Edelstahl | Aluminium, Edelstahl | Aluminium, Edelstahl | Aluminium, Edelstahl | |
| Laufleistung bei 1013 hPa, 2 kg Nutzlast, 70% Einschaltdauer | > 30 km | > 30 km | > 30 km | > 30 km | > 30 km | > 30 km | |
| Anschlüsse und Umgebung | N-331.10 | N-331.13 | N-331.20 | N-331.23 | N-331.40 | N-331.43 | Toleranz |
| Betriebstemperaturbereich | 0 bis 50 °C | 0 bis 50 °C | 0 bis 50 °C | 0 bis 50 °C | 0 bis 50 °C | 0 bis 50 °C | |
| Anschluss | D-Sub 37 (m) | D-Sub 37 (m) | D-Sub 37 (m) | D-Sub 37 (m) | D-Sub 37 (m) | D-Sub 37 (m) | |
| Kabellänge | 2 m | 2 m | 2 m | 2 m | 2 m | 2 m | |
| Empfohlene Controller / Treiber | E-712.1AN • E-712.2AN • E-712.3AN | E-712.1AN • E-712.2AN • E-712.3AN | E-712.1AN • E-712.2AN • E-712.3AN | E-712.1AN • E-712.2AN • E-712.3AN | E-712.1AN • E-712.2AN • E-712.3AN | E-712.1AN • E-712.2AN • E-712.3AN |
Stellweg in X, ungeregelt: Von einem mechanischen Anschlag des Läufers zum anderen mechanischen Anschlag, nur in ungeregeltem Betrieb
Geschwindigkeit (100 % Ansteuerung, Vollschrittbetrieb): Abhängig vom Controller, der Last und den Regelparametern; Controller hier: E-712.AN. Für längere Positioniervorgänge sollte der Linearaktor mit diesem Controller bei einer Geschwindigkeit unter 3 mm/s betrieben werden.
Betriebsfrequenz im Vollschrittbetrieb: Bei Betrieb mit Digitalcontroller mit 25 W Spitzenausgangsleistung
Alle Angaben beziehen sich auf Raumtemperatur (22 °C ±3 °C).
Technische Daten werden bei PI bei 22 ±3 °C spezifiziert. Die angegebenen Werte gelten im unbelasteten Zustand, wenn nicht anders angegeben. Teilweise sind Eigenschaften voneinander abhängig. Die Angabe "typ." kennzeichnet einen statistischen Mittelwert für eine Eigenschaft; sie gibt keinen garantierten Wert für jedes ausgelieferte Produkt an. Bei der Ausgangsprüfung eines Produkts werden nicht alle, sondern nur ausgewählte Eigenschaften geprüft. Beachten Sie, dass sich einige Produkteigenschaften mit zunehmender Betriebsdauer verschlechtern können.
N-331 Piezoelektrischer Schreitantrieb PICMAWalk
N-331 3D Modell
Fordern Sie ein unverbindliches Angebot über gewünschte Stückzahlen, Preise und Lieferzeiten an oder beschreiben Sie Ihre gewünschte Modifikation.
PICMAWalk Schreitantrieb; 30 mm Stellweg (ungeregelt); 50 N Antriebskraft; 12 mm/s maximale Geschwindigkeit; 2 m Kabellänge
PICMAWalk Schreitantrieb; 25 mm Stellweg; 50 N Antriebskraft; 12 mm/s maximale Geschwindigkeit; inkrementeller Linearencoder; 2 m Kabellänge
PICMAWalk Schreitantrieb; 55 mm Stellweg (ungeregelt); 50 N Antriebskraft; 12 mm/s maximale Geschwindigkeit; 2 m Kabellänge
PICMAWalk Schreitantrieb; 50 mm Stellweg; 50 N Antriebskraft; 12 mm/s maximale Geschwindigkeit; inkrementeller Linearencoder; 2 m Kabellänge
PICMAWalk Schreitantrieb; 105 mm Stellweg (ungeregelt); 50 N Antriebskraft; 12 mm/s maximale Geschwindigkeit; 2 m Kabellänge
PICMAWalk Schreitantrieb; 100 mm Stellweg; 50 N Antriebskraft; 12 mm/s maximale Geschwindigkeit; inkrementeller Linearencoder; 2 m Kabellänge
Erhalten Sie innerhalb kürzester Zeit per E-Mail oder Telefon eine Rückmeldung zu Ihren Fragen von einem PI Vertriebsingenieur.

PiezoWalk®Antriebe wurden für die Halbleiterindustrie entwickelt, die hohe Anforderungen an die Zuverlässigkeit, Positionsauflösung und Stabilität hat.

Hohe Zuverlässigkeit und überlegene Lebensdauer durch das patentierte Herstellungsverfahren für Multilayer-Aktoren.

Sorgfältige Handhabung und adäquate Räumlichkeiten: PI verfügt nicht nur über die Ausstattung zur Qualifizierung von Materialien, Komponenten und Endprodukten, sondern auch über langjährige Erfahrung im Bereich der HV- und UHV-Positioniersysteme.

Digitale Controller haben gegenüber analogen Verstärkerelektroniken Vorteile, die vor allem bei hochpräzisen Positionieraufgaben zum Tragen kommen.

Bei längeren Stellwegen ab ca. 1 Millimeter stoßen die kapazitiven Messsysteme an ihre Grenzen: PI verwendet daher inkrementelle Messsysteme.

Hexapoden sind Systeme für die Bewegung und Positionierung von Lasten in sechs Freiheitsgraden – in drei translatorischen Achsen und drei rotatorischen Achsen.



