P-736.ZRN2S
PInano® Z-Piezoscannersystem mit freier Apertur für Mikrotiterplatten; für inverse Nikon-Mikroskope; 220 µm Stellweg; piezoresistive Sensoren; mit USB-Digitalcontroller






Einsatzgebiete
Nanopositioniersystem der Präzisionsklasse für die hochauflösende Mikroskopie
Optimiert für ein besonders schnelles Einschwingen auf der Zielposition. Besonders niedrige Bauhöhe von 18 mm für einfache Integration. Versionen für inverse Mikroskope von Nikon und Olympus verfügbar.
PICMA® Piezoaktorantrieb
Vollkeramische Isolierung für maximale Betriebsdauer. Deutlich höhere Unempfindlichkeit gegen Feuchtigkeit. Hohe Führungsgenauigkeit dank FEM-optimierten Festkörpergelenken.
Versionen mit piezoresistiven oder kapazitiven Sensoren
- Hochauflösende piezoresistive Sensoren für stabile Positionsregelung
- Direktmessende kapazitive Sensoren für deutlich verbesserte Stabilität und Wiederholgenauigkeit gegenüber piezoresistiven Sensoren
System mit Controller und Software
Der kompakte, digitale Piezoservocontroller E-709 ist im Lieferumfang enthalten. Digitale Regler ermöglichen im Betrieb Parameteränderung per Software. Ansteuerung über USB, RS-232 und eine breitbandige, analoge Schnittstelle möglich. Unterstützt PIMikroMove®, NanoCapture. PI General Command Set (GCS). Treiber für LabVIEW, dynamische Bibliotheken für Windows und Linux. Kompatibel mit µManager, MATLAB und Andor iQ.
| Bewegen | P-736.ZRN2S | PD73Z2ROW | P-736.ZCN2S | PD73Z2COW | Toleranz |
|---|---|---|---|---|---|
| Aktive Achsen | Z | Z | Z | Z | |
| Stellweg in Z | 220 µm | 220 µm | 220 µm | 220 µm | |
| Positionieren | P-736.ZRN2S | PD73Z2ROW | P-736.ZCN2S | PD73Z2COW | Toleranz |
| Integrierter Sensor | Piezoresistiv, indirekte Positionsmessung | Piezoresistiv, indirekte Positionsmessung | Kapazitiv, direkte Positionsmessung | Kapazitiv, direkte Positionsmessung | |
| Systemauflösung in Z | 1 nm | 1 nm | 1 nm | 1 nm | |
| Antriebseigenschaften | P-736.ZRN2S | PD73Z2ROW | P-736.ZCN2S | PD73Z2COW | Toleranz |
| Antriebstyp | PICMA® | PICMA® | PICMA® | PICMA® | |
| Mechanische Eigenschaften | P-736.ZRN2S | PD73Z2ROW | P-736.ZCN2S | PD73Z2COW | Toleranz |
| Resonanzfrequenz in Z, belastet mit 100 g | 250 Hz | 250 Hz | 250 Hz | 250 Hz | ±20 % |
| Zulässige Druckkraft in Z | 5 N | 5 N | 5 N | 5 N | max. |
| Führung | Festkörpergelenksführung mit Hebelübersetzung | Festkörpergelenksführung mit Hebelübersetzung | Festkörpergelenksführung mit Hebelübersetzung | Festkörpergelenksführung mit Hebelübersetzung | |
| Gesamtmasse | 850 g | 850 g | 850 g | 850 g | ±5 % |
| Material | Aluminium | Aluminium | Aluminium | Aluminium | |
| Anschlüsse und Umgebung | P-736.ZRN2S | PD73Z2ROW | P-736.ZCN2S | PD73Z2COW | Toleranz |
| Betriebstemperaturbereich | 15 bis 40 °C | 15 bis 40 °C | 15 bis 40 °C | 15 bis 40 °C | |
| Anschluss | D-Sub 9 (m) | D-Sub 9 (m) | D-Sub 7W2 (m) | D-Sub 7W2 (m) | |
| Kabellänge | 1,7 m | 1,7 m | 1,7 m | 1,7 m | ±10 mm |
| Kompatible inverse Mikroskope | Nikon Eclipse Ti2 ǀ Nikon Eclipse Ti | Olympus IX3 ǀ Olympus IX2 ǀ Olympus IX | Nikon Eclipse Ti2 ǀ Nikon Eclipse Ti | Olympus IX3 ǀ Olympus IX2 ǀ Olympus IX | |
| Controller | P-736.ZRN2S | PD73Z2ROW | P-736.ZCN2S | PD73Z2COW | Toleranz |
| Controllertyp | E-709 (im Lieferumfang enthalten) | E-709 (im Lieferumfang enthalten) | E-709 (im Lieferumfang enthalten) | E-709 (im Lieferumfang enthalten) | |
| Anwendungsbezogene Funktionen | Datenrekorder | Datenrekorder | Datenrekorder | Datenrekorder | |
| Bewegungstypen | Funktionsgenerator | Funktionsgenerator | Funktionsgenerator | Funktionsgenerator | |
| Kommunikationsschnittstellen | RS-232 ǀ SPI ǀ USB | RS-232 ǀ SPI ǀ USB | RS-232 ǀ SPI ǀ USB | RS-232 ǀ SPI ǀ USB | |
| Befehlssatz | GCS 2.0 | GCS 2.0 | GCS 2.0 | GCS 2.0 | |
| Bedienersoftware | PIMikroMove® | PIMikroMove® | PIMikroMove® | PIMikroMove® | |
| Software-APIs | Dynamische Bibliothek für PI General Command Set (GCS) ǀ C, C++, C# ǀ MATLAB ǀ NI LabView | Dynamische Bibliothek für PI General Command Set (GCS) ǀ C, C++, C# ǀ MATLAB ǀ NI LabView | Dynamische Bibliothek für PI General Command Set (GCS) ǀ C, C++, C# ǀ MATLAB ǀ NI LabView | Dynamische Bibliothek für PI General Command Set (GCS) ǀ C, C++, C# ǀ MATLAB ǀ NI LabView | |
| I/O-Leitungen | 1× Analogeingang 0 bis 10 V; 1× Sensormonitor 0 bis 10 V; 1× Digitaleingang (LVTTL, programmierbar); 1× Analogausgang; 5× Digitalausgang (LVTTL, 3× vordefiniert, 2× programmierbar) | 1× Analogeingang 0 bis 10 V; 1× Sensormonitor 0 bis 10 V; 1× Digitaleingang (LVTTL, programmierbar); 1× Analogausgang; 5× Digitalausgang (LVTTL, 3× vordefiniert, 2× programmierbar) | 1× Analogeingang 0 bis 10 V; 1× Sensormonitor 0 bis 10 V; 1× Digitaleingang (LVTTL, programmierbar); 1× Analogausgang; 5× Digitalausgang (LVTTL, 3× vordefiniert, 2× programmierbar) | 1× Analogeingang 0 bis 10 V; 1× Sensormonitor 0 bis 10 V; 1× Digitaleingang (LVTTL, programmierbar); 1× Analogausgang; 5× Digitalausgang (LVTTL, 3× vordefiniert, 2× programmierbar) | |
| Abmessungen Controller | 160 mm × 96 mm × 33 mm | 160 mm × 96 mm × 33 mm | 160 mm × 96 mm × 33 mm | 160 mm × 96 mm × 33 mm | |
| Antriebsfunktionen | Autozero | Autozero | Autozero | Autozero | |
| Bewegungsabhängige Ein- und Ausgänge | Digitaler Triggereingang ǀ Digitaler Triggerausgang | Digitaler Triggereingang ǀ Digitaler Triggerausgang | Digitaler Triggereingang ǀ Digitaler Triggerausgang | Digitaler Triggereingang ǀ Digitaler Triggerausgang | |
| Integration in Drittanbieter-Lösungen | MetaMorph ǀ µManager ǀ Andor iQ | MetaMorph ǀ µManager ǀ Andor iQ | MetaMorph ǀ µManager ǀ Andor iQ | MetaMorph ǀ µManager ǀ Andor iQ |
Zulässige Druckkraft in Z: Die empfohlene Last für den dynamischen Betrieb beträgt 500 g (max.). Mit weniger Last ist eine höhere Dynamik möglich.
Technische Daten werden bei PI bei 22 ±3 °C spezifiziert. Die angegebenen Werte gelten im unbelasteten Zustand, wenn nicht anders angegeben. Teilweise sind Eigenschaften voneinander abhängig. Die Angabe "typ." kennzeichnet einen statistischen Mittelwert für eine Eigenschaft; sie gibt keinen garantierten Wert für jedes ausgelieferte Produkt an. Bei der Ausgangsprüfung eines Produkts werden nicht alle, sondern nur ausgewählte Eigenschaften geprüft. Beachten Sie, dass sich einige Produkteigenschaften mit zunehmender Betriebsdauer verschlechtern können.
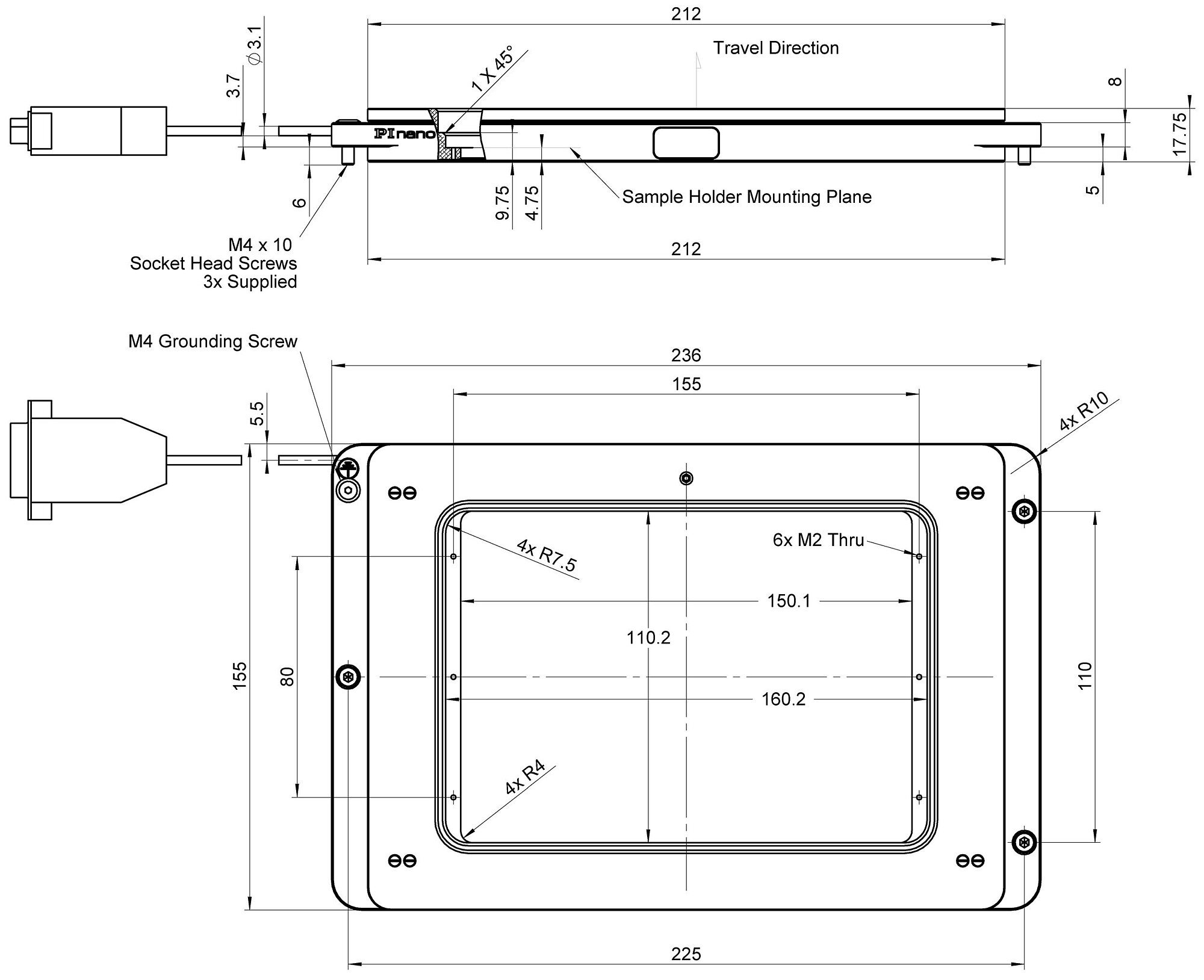
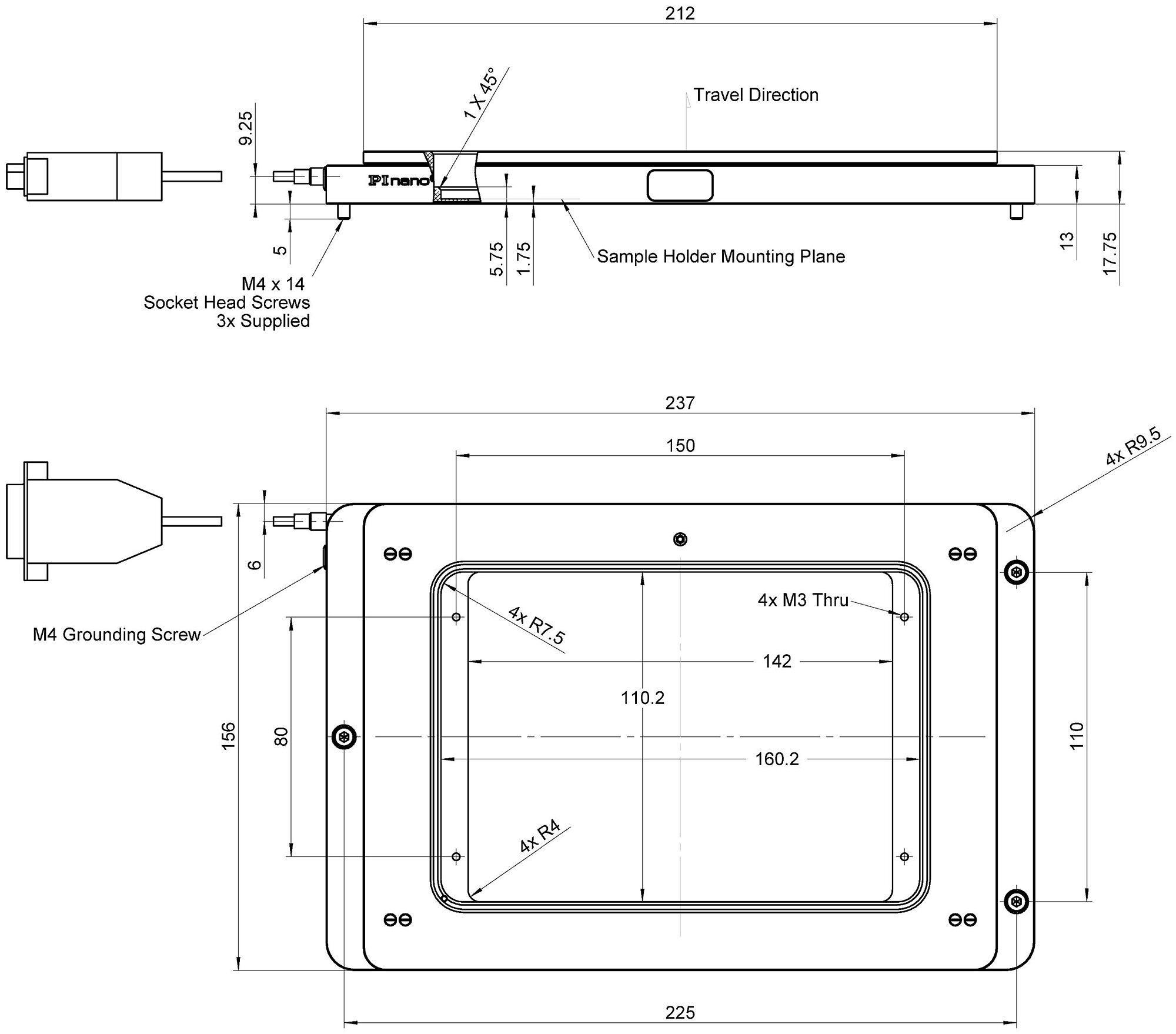
P-736.ZxO / P-736.ZxN2 PInano® Piezoscanner (Teil der PD73Z2xOW / P-736.ZxN2S Piezoscannersysteme)
E-709 digitaler Piezocontroller, 1 Kanal, -30 bis 130 V
Probentische und -halter für inverse Mikroskope
Fordern Sie ein unverbindliches Angebot über gewünschte Stückzahlen, Preise und Lieferzeiten an oder beschreiben Sie Ihre gewünschte Modifikation.
PInano® Z-Piezoscannersystem mit freier Apertur für Mikrotiterplatten; für inverse Nikon-Mikroskope; 220 µm Stellweg; piezoresistive Sensoren; mit USB-Digitalcontroller
PInano® Z-Piezoscannersystem mit freier Apertur für Mikrotiterplatten; für inverse Olympus-Mikroskope; 220 µm Stellweg; piezoresistive Sensoren; mit USB-Digitalcontroller
PInano® Z-Piezoscannersystem mit freier Apertur für Mikrotiterplatten; für inverse Nikon-Mikroskope; 220 µm Stellweg; kapazitive Sensoren; mit USB-Digitalcontroller
PInano® Z-Piezoscannersystem mit freier Apertur für Mikrotiterplatten; für inverse Olympus-Mikroskope, 220 µm Stellweg; kapazitiver Sensor; mit USB-Digitalcontroller
Erhalten Sie innerhalb kürzester Zeit per E-Mail oder Telefon eine Rückmeldung zu Ihren Fragen von einem PI Vertriebsingenieur.

Hohe Zuverlässigkeit und überlegene Lebensdauer durch das patentierte Herstellungsverfahren für Multilayer-Aktoren.
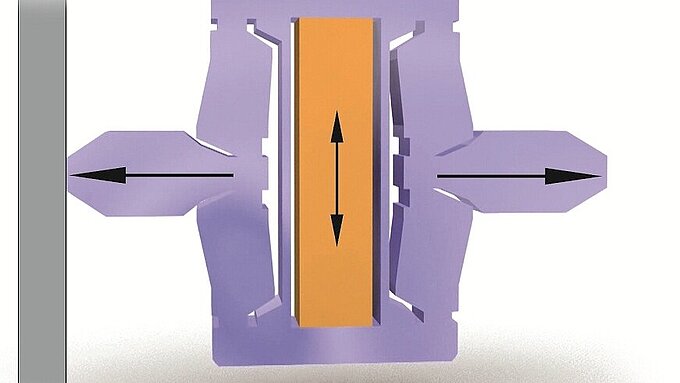
Festkörpergelenksführungen von PI führen den Piezoaktor und dienen der geradlinigen Bewegung ohne Verkippung oder seitlichen Versatz.

Digitale Controller haben gegenüber analogen Verstärkerelektroniken Vorteile, die vor allem bei hochpräzisen Positionieraufgaben zum Tragen kommen.













